Using artificial vision to move KUKA robots (4K)

ฝัง
- เผยแพร่เมื่อ 25 ก.ค. 2024
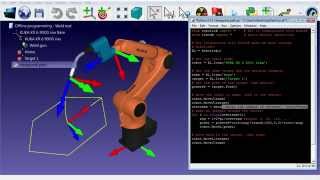
- In this video, we show how to use one of the functionalities of RoboDK which is using python scripts.
In the python program we used opencv for the artificial vision and mediapipe for the hand-tracking.
This script allows us to control the robot by signalling it with our hand, with the number of the target/point we declared.
github.com/Rebots-Spain/robod...
-------------------------------------------------------------------------------------------------------------------------------------------------------
Video chapters:
-------------------------------------------------------------------------------------------------------------------------------------------------------
00:00 - Intro
00:25 - Starting-up roboDK
01:00 - DEMO python script
01:30 - Controlling with vision using OpenCV
02:17 - Pre-requisites (KukaVarproxy, global variables, roboDKsync35)
02:45 - Recap
04:37 - Adding a python script to RoboDK station
05:27 - Visual Studio Code (OpenCV+mediapipe)
06:17 - OpenCv Face-tracking and hand-tracking
07:45 - Sample code RoboDK python program, fixing caption target
08:35 - Simulating the program
08:55 - Executing on the robot
09:10 - DEMO - Final test
9:45 - Outro
-------------------------------------------------------------------------------------------------------------------------------------------------------
To know more about us follow/Para saber más síguenos en:
- Web: rebots.tk/
- LinkedIn: / rebots
- Instagram: / rebots.tk
- Facebook: / rebots.tk
Partner:
- Website: www.eurobots.net/
- LinkedIn: / robots-industriales
- IG: / eurobots.it
- FB: / eurobots
-------------------------------------------------------------------------------------------------------------------------------------------------------
En este video, mostramos cómo utilizar una de las funcionalidades de RoboDK que utiliza scripts de python.
En el programa python usamos opencv para la visión artificial y mediapipe para el seguimiento manual.
Este script nos permite controlar el robot señalándolo con la mano, con el número del objetivo/punto que declaramos.
-------------------------------------------------------------------------------------------------------------------------------------------------------
Dans cette vidéo, on montre comment utiliser l'une des fonctionnalités de RoboDK qui utilise des scripts python.
Dans le programme python, nous utilisons opencv pour la vision artificielle et mediapipe pour le suivi manuel.
Ce script nous permet de contrôler le robot en le pointant avec la main, avec le numéro de cible/point que nous déclarons.
-------------------------------------------------------------------------------------------------------------------------------------------------------
Neste vídeo, mostramos como usar um dos recursos do RoboDK que usa scripts python.
No programa python usamos opencv para visão de máquina e mediapipe para rastreamento manual.
Este script nos permite controlar o robô apontando para ele com a mão, com o número do alvo/ponto que declaramos.
-------------------------------------------------------------------------------------------------------------------------------------------------------
In diesem Video zeigen wir, wie Sie eine der Funktionen von RoboDK verwenden, die Python-Skripte verwendet.
Im Python-Programm verwenden wir opencv für maschinelles Sehen und mediapipe für manuelles Tracking.
Dieses Skript ermöglicht es uns, den Roboter zu steuern, indem wir mit der Hand auf ihn zeigen, mit der Nummer des Ziels/Punkts, den wir deklarieren.
-------------------------------------------------------------------------------------------------------------------------------------------------------
In questo video, mostriamo come utilizzare una delle funzionalità di RoboDK che utilizza script python.
Nel programma Python utilizziamo opencv per la visione artificiale e mediapipe per il tracciamento manuale.
Questo script ci permette di controllare il robot puntandolo con la mano, con il numero del target/punto che dichiariamo.
-------------------------------------------------------------------------------------------------------------------------------------------------------
在本视频中,我们展示了 RoboDK 的一项功能,它使用了 python 脚本。
在 python 程序中,我们使用 opencv 进行人工视觉,使用 mediapipe 进行手部跟踪。
该脚本允许我们通过用手向机器人发出信号来控制机器人,其中包含我们声明的目标/点的编号。
-------------------------------------------------------------------------------------------------------------------------------------------------------
#INNOVATION #KUKA #OPENCV
VISION RESEARCH INDUSTRIAL IOT AUTOMATION DEVELOPMENT ROBOTS INDUSTRY40 4K - วิทยาศาสตร์และเทคโนโลยี








This is a great tutorial showing how to move a robot using hand gestures!
We just published a new update to fix the bug you mentioned around minute 8, thank you for explaining the issue. Let us know if this issue persists.
Thank you for your comment! Never expected the official account to comment on our videos!
You guys are awesome for fixing the issue so fast, great support!
Btw, I wasn't complaining, just felt weird that sometimes wasn't saving, I thought it was a personal issue. Normally I copy the code from visual studio.
This is just amazing! Never thought vision could be achieved by a webcam! Will surely try this out on our college bot!
Thank you, yeah of course if you are interested in vision check out OpenCV, most of the basic training is done with a webcam or raspberry pi camera.
I'm happy to find this channel, I've been struggling to learn kuka system integration on my own.
Would you like to proffer a step by step guide to follow?
Thank you
Thank you for your comment We are working towards that goal.
Another video that was so amazing,.... !!! Thank you, for you make it. ..
Thank you for the comment! We have many projects in mind we want to do and this one was one of them. Hope you keep watching our videos and enjoy them!
@@rebots I really enjoyed the video, actually, I follow some steps that you did, cause I would like to try to do something like that, and again thanks for your video..
Could You share the Github link? Please .
@@josebalam5279 Yeah I was uploading the code. But it's now on the description of the video.
@@rebots thanks 👍
I have a question.... How would I control a gripper from python for pick and place applications?
Good question for that you will need to work with the IOs.
Very simple since the library has functions to interact with inputs and outputs.
You just need to activate the desired output that is connected to the input of the gripper.
robodk.com/doc/en/PythonAPI/robodk.html#robodk.robolink.Item.setDO