Méthode de Denavit Hartenberg modifiée (convention Khalil Kleinfinger)

ฝัง
- เผยแพร่เมื่อ 4 พ.ย. 2024
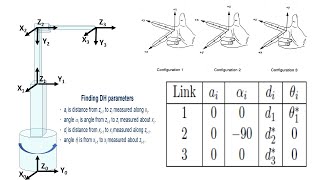
- Cette vidéo présente la méthode de Denavit Hartenberg modifiée (Khalil Kleinfinger) pour le placement des axes et le modèle géométrique direct d'un robot manipulateur.
Attention, ce n''est pas la méthode "historique" qui est présentée : • Méthode de Denavit Har...








Bonsoir, votre vidéo explique bien la méthode pour calculer le MGD d'un robot par la méthode DHKK. Il y a une chose que je n'ai pas bien compris au niveau de l'axe X pour chaque articulations. Je ne comprends pas la "normale commune" entre l'axe zi-1 et zi. Merci d'avance.
Bonjour, c'est avec un peu de retard (j'en suis désolé) que je réponds à votre question avec cette vidéo : th-cam.com/video/F5-Bb8fatOY/w-d-xo.html J'espère que cela vous éclairera, sinon n'hésitez pas à reposer des questions.
Vous pouvez partager le cours complet s'il te plait ?
vous avez tout disponible sur la playlist : th-cam.com/play/PLnLgSm1YaX1_PNu-GJ6vxh4FA308knNR3.html
@@justeunpetitcours2108je veux une format numérique si possible
désolé, je n'ai pas encore réfléchi pour partager les pdf, mais je vais y penser
S'il vous plaît, je cherche des cours on pdf
il y a ce site : fr.slideshare.net/souissi2013/cours-robotique-complet