I've been using Mathematica to graph the workspaces. You can try some of these for free at demonstrations.wolfram.com/RobotManipulatorWorkspaces/ (requires a free download). I can relatively easily generate the workspace for a 3 DOF robot, but drawing the workspace for a 4 or more DOF robot is slow.
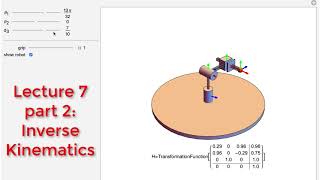
Amazing video , so with this transformation matrix , do we take the coordinates of the end effector and multiply it by this transformation matrix to get the coordinates of the end effector with respect to the world frame ?
No, this matrix (H = T_3^0 @11:33) tells you the coordinates of the end effector using the world from as the reference frame. This is a three link manipulator, so the world (or base) frame is frame 0, and the end effector frame is 3. You multiple the three homogeneous A matrixes to get this total transformation matrix: A_1*A_2*A_3 = T_3^0.
Sir, you are filling this dh table in a completely random way, it does not make it easier to understand. I did but for someone else it could be difficult. Please, consider filling it either row by row or column by column
Thanks for this comment. Sometimes professors forget they are teaching people that have different range of assimilation. Some of us have a linear process of learning.😅









Watched before the robotics engineering exam. Thanks!
Best video I have seen so far!!
Man you can teach..Respect!
Hi, I do not understand the A2 matrix, is there not a translation by the link?
Really good video Sir, could you tell me what software you use to simulate workspace of robot , thanks you so much
I've been using Mathematica to graph the workspaces. You can try some of these for free at demonstrations.wolfram.com/RobotManipulatorWorkspaces/ (requires a free download). I can relatively easily generate the workspace for a 3 DOF robot, but drawing the workspace for a 4 or more DOF robot is slow.
Simply explained , thank you sir
Thanks pro.. can i ask you what is the name of the simulation prog that u use at the end of the video?
I use mathematica to make my demonstrations. You can find them (and the code) at demonstrations.wolfram.com/author.html?author=Aaron+T.+Becker
In matrix A2 isn't the translation along the x axis by r2? Why were c2 and s2 used instead
whats the software you use at the end for the simulation?
A Mathematica file my student and I made. You can play with it at demonstrations.wolfram.com/CommonRobotArmConfigurations/
excellent explanation, thanks
Can you teach parallel robot?
Amazing video , so with this transformation matrix , do we take the coordinates of the end effector and multiply it by this transformation matrix to get the coordinates of the end effector with respect to the world frame ?
No, this matrix (H = T_3^0 @11:33) tells you the coordinates of the end effector using the world from as the reference frame. This is a three link manipulator, so the world (or base) frame is frame 0, and the end effector frame is 3. You multiple the three homogeneous A matrixes to get this total transformation matrix: A_1*A_2*A_3 = T_3^0.
I don't really get what's c1 and r1 in the A1 matrix. It has some connection to Theta1 but I don't really get it
The abbreviation for cos(theta1) is c1, and r1 is the radial distance of the rotation about the axis z0. This is the distance along x1 from z0 to z1.
Nice video TQ
Sir, you are filling this dh table in a completely random way, it does not make it easier to understand. I did but for someone else it could be difficult. Please, consider filling it either row by row or column by column
Yes, that would be a better way to do this -- next time!
Thanks for this comment. Sometimes professors forget they are teaching people that have different range of assimilation. Some of us have a linear process of learning.😅
Thank you🌹
Thanks! I hope your robotics journey is going well!
@@AaronBecker Yes, of course, this is excellent🌹