I hope you enjoyed this video and learned something new! If you'd like to support me making more content like this, please consider supporting me on Patreon: www.patreon.com/howtomechatronics
Who cares about your voice bro, it's your brain we come here for. This is the best tutorial on H bridge and arduion I have ever run across, thank you for making it.
This is kind of amazing, I was able to follow this video as a non engineer because of some video tutorials on youtube and how well this was presented. Seriously, thank you.
All of your videos deserve lot of superlative adjectives. Extremely good quality project and your explanation of theory and the Arduino sketch were precise and clear. May I suggest you do a self balancing two wheel "robot" project and cover PID in detail ?
Very good tutorial. I am working on version with NodeMCU and plan to use Blynk for controlling it over the internet. I get a lot of good information from this video. Thank you !
Don't change the rotation direction suddenly, you will damage the motor. You should reduce the speed to zero, delay for a bit to let the motor stop and then accelerate in the opposite direction.
The most well explained video so far that i found! thanks for showing the better understanding how to connect this driver to arduino. I am planning to do an 8 motor of ROV on my own. My question is how can we connect this motor driver if i should be using 4 piece of them? since 1 piece of driver is use for a pair of motor
5:26 why in1 and in2 not OUTPUT? (you have both pins run with digitalWrite command). Also, when you push a button, you can result in value of 0,1,HIGH,LOW,True,and False? Why do you choose True or False instead of 0&1 or High&LOW? and buttonState is declared in the beginning but is not used anywhere in the code.
Thank you to you for taking the time to put together a video to help others online with their robotics projects. There are some mistakes though...ena, in1, in2, should be outputs. Button should be an input. The resistor should be on the positive side of the or on the 5v wire or the pin 4 wire, this is to protect the circuit. You don't necessarily rotDirection in your code, you can change directions without this.
I wish sometimes these guys making youtube videos have Lectures live in universities to show other lectures how to guide people in search for solutions
In case someone connects the motor to A or B with ENB enabled (means motor is not PWM regulated, runs at full speed) with 12V jumper enabled and is surprised nothing happens after turning power on, there is a simple reason. Just connect a wire to 5V out, power on again and then touch either one of two pins, for example IN1 if motor is connected to A, that regulate the rotation direction (forward/backward). The motor will start turning.
Hi, Im trying to build a similar circuit: 24v power supply with a h bridge controller for a 24v servo motor, what I'm worried about its sending the 24V (+) to the VIN Power Pin of the Arduino card (min 06:40).
Amazing video....helped me for my school spy bot project. Wanted to control the motors using DTMF successfully done... But there is a mistake: 5:27 set the pinmode for the in1 and in2 as input. it should be output
Great video. Can you link a parts list and where you bought the parts from? I know you didnt mention a diode but I am assuming that is necessary? Also is the MOSFET a separate component? Or is it included with the L298N ? Sorry if these are beginner questions. I am new to this
Well, how can I control a DC motor and a Servo motor at the same time? Would L298N control both of them at the same time or would I need two L298Ns for that? Or is there a better way to do that ? :) Thanks for the video!
are you sure? Cause that's what I did and it didn't run, but when I changed those to INPUT it started to work, and now I'm baffled why. There is nothing in datasheet of bridge that would explain it ;(
Of course. You can do that. You can even do things like use the sonar sensor to "look" for an obstruction, then program it to back up, turn, and move again.
Hello 1) How do you think the code will be changed? if 1 motor uses to control left-right and 1 motor uses to move forward -backward? 2) do you think the code was without backward left and backward right situation?
Thanks for this instructional & educational video! May I check with you... could I use a normal disposable 9V battery instead to power up 2 smaller DC motors each rated about 4-6V?
a standard 9V battery has a capacity of about 500 mAh. This battery will be empty after 2 or 3 hour of use even with small motors. If you would like to use them anyway you need a DC-DCstep-down voltage-regulator to reduce the voltage down to 6V
I have one similar project but with a 5v motor and a 5v power suply, how can I connect the power suply to both arduino and motor and leds, cause if I conect via USB and it runs slow
100 Amps is way too high and some motor drivers like sabertooth are there which can provide around 60 amps but they cost a lot. So check for a motor driver which supplies your required current
@@2305989 I was thinking that this can be used to control MOSFETS and not motors. And so for the high AMPS, the MOSFETs should be able to handle those.
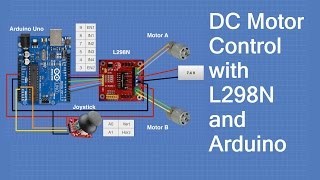
In the website notes regarding the L298N you say: "In this case the 5V pin will be used as input as we need connect it to a 5V power supply in order the IC to work properly." But in your schematic diagram nothing is connected to the 5V pin. And it looks like the Arduino is being powered by the same 12V battery that is powering the 2 motors.
Question. Besides the L298N driver max 2 ampere. Wich type of Arduino board are you using or do you advise using in your DC motor control ? The "Uno R3" The "Mega 2560" or The Arduino NAno 33 i/o









I hope you enjoyed this video and learned something new! If you'd like to support me making more content like this, please consider supporting me on Patreon: www.patreon.com/howtomechatronics
dc brush or
bl?
@howtomechatronics Please what software or program did you use in creating the electrical connection animation?
where the code at?
Nice voice and video bro👍👍
Who cares about your voice bro, it's your brain we come here for. This is the best tutorial on H bridge and arduion I have ever run across, thank you for making it.
Glad you found it helpful, cheers!
This is kind of amazing, I was able to follow this video as a non engineer because of some video tutorials on youtube and how well this was presented. Seriously, thank you.
Thank you for including the written article for this video!! Both resources are clear and easy to follow.
Great, and the schematics and illustrations are perfrect
All of your videos deserve lot of superlative adjectives. Extremely good quality project and your explanation of theory and the Arduino sketch were precise and clear. May I suggest you do a self balancing two wheel "robot" project and cover PID in detail ?
Thanks dude for such amazing tutorial the quality of the content that you have provided to us is very much helpfull.
Keep sharing your knowledge!!
Perfect. Explained very well, and clearly. Straight to the point as well. Fantastic video all round really. Thank you.
Very good tutorial. I am working on version with NodeMCU and plan to use Blynk for controlling it over the internet. I get a lot of good information from this video. Thank you !
Thanks, I'm glad you found it useful!
I like this in-depth review dude, you're awesome!
This is so cool! All you need now is one more, then you can add weapons and fight them! 😜🤣
@David Pacák burn.
@David Pacák ussr anthem in background😂🔥
Very well explained.The schematics and illustrations are perfrect. Fantastic video
Thanks for the video it was helpful. No need to add potentiometer or buttons. Isolating everything makes it faster to undersand.
This is a very informative video, I have just starting learning with my own arduino starter kit, this helps to explain a few things. Cheers buddy.
This is so sick! I want an arduino so bad omg
You are the best arduino teacher
Very detailed demo of the project 👍
Great video! This is exactly what I was looking for and just the right amount of detail.
Glad it was helpful!
Don't change the rotation direction suddenly, you will damage the motor. You should reduce the speed to zero, delay for a bit to let the motor stop and then accelerate in the opposite direction.
I'm sorry that I can't support you but i have to tell that you would deserve more for these videos.
Dude amazing video. Good quality tutorial
very nice video. specially for novice. explains every details
Great video! Very detailed and concise. Thank you.
Very informative..
🔥 fire really loved ur project
Best electronic TH-cam channel
6:33 is it ok to supply the vin input with the 11.1V battery?
The most well explained video so far that i found! thanks for showing the better understanding how to connect this driver to arduino. I am planning to do an 8 motor of ROV on my own. My question is how can we connect this motor driver if i should be using 4 piece of them? since 1 piece of driver is use for a pair of motor
Loved this tutorial! Thnx for explanations
凄いなーー〜
見た目がかっこいい!
awesome video ... subscribed. good luck man.
You make things real easy, great video.
5:26 why in1 and in2 not OUTPUT? (you have both pins run with digitalWrite command).
Also, when you push a button, you can result in value of 0,1,HIGH,LOW,True,and False? Why do you choose True or False instead of 0&1 or High&LOW?
and buttonState is declared in the beginning but is not used anywhere in the code.
Same quest as me! Lol.
Outstanding write up! Thanks for sharing your skills and thills
Thank you!
Thank you to you for taking the time to put together a video to help others online with their robotics projects. There are some mistakes though...ena, in1, in2, should be outputs. Button should be an input. The resistor should be on the positive side of the or on the 5v wire or the pin 4 wire, this is to protect the circuit. You don't necessarily rotDirection in your code, you can change directions without this.
Great video and explanation!
You just rescued me ❤️
Great Video thanks a lot .. We really really appreciated .. keep going
This is so useful, thank you so so much!
Glad it was helpful!
Wow, excellent tutorial !!!! thanks :) :) :)
This is a well done video!
and how did you define the motor speed PWM as 255 when your motor`s 12V with 100rpm
is there any calculation formula for PWM in motor speed
PWM sends an 8bit signal so its values range from 0-255.. think of 255 as 100% and 0 as 0%.. if you want it to go 50% simply send it 127 and so on..
@@johnturk158 thank you so much. Stay healthy
Thanks for another great tutorial vid. Keep up the great work.
That was very well done.
always good in explanation. Thank you for sharing knowledge
Hi there! I was just wondering what the purpose of the 10k ohm resistor in the diagram at 1:09 in the video
Great video. Thank you!
nice video sir ...very neatly explained
Yeah, I agree!
I wish sometimes these guys making youtube videos have Lectures live in universities to show other lectures how to guide people in search for solutions
5:20 Shouldn't the 12V power supply ground be also connected to the Arduino ground as well?
yep
In case someone connects the motor to A or B with ENB enabled (means motor is not PWM regulated, runs at full speed) with 12V jumper enabled and is surprised nothing happens after turning power on, there is a simple reason. Just connect a wire to 5V out, power on again and then touch either one of two pins, for example IN1 if motor is connected to A, that regulate the rotation direction (forward/backward). The motor will start turning.
Hi, Im trying to build a similar circuit: 24v power supply with a h bridge controller for a 24v servo motor, what I'm worried about its sending the 24V (+) to the VIN Power Pin of the Arduino card (min 06:40).
Thank you for your clear tutorial.
Always nice explain,,,
waiting for your new videos..
Awesome tutorial! 👏 Are you italian?
Outstanding ..... Thank you for sharing
what is the white and black thing at the begining of the exit of the motor in the 1:20 minute?
its a diode
It's a diode and it's silver and black.
You may also call it a p-n junction diode.
Hope it helps...
Great lessons. Thank you.
Can i use more than 2 Motors? With the L298N?
Could you please make a tutorial on how to transmit data over the powerline using the
KQ-130F Power Line Carrier Module?
It would be very nice.
very well explained you have my thanks
Amazing video....helped me for my school spy bot project. Wanted to control the motors using DTMF successfully done... But there is a mistake: 5:27 set the pinmode for the in1 and in2 as input. it should be output
Yes
Great video. Can you link a parts list and where you bought the parts from? I know you didnt mention a diode but I am assuming that is necessary? Also is the MOSFET a separate component? Or is it included with the L298N ? Sorry if these are beginner questions. I am new to this
Well, how can I control a DC motor and a Servo motor at the same time? Would L298N control both of them at the same time or would I need two L298Ns for that? Or is there a better way to do that ? :)
Thanks for the video!
At 5:20 you use a resistance and you don't tell the value. What is the value for the resistance? Thanks
Congratulations for 50k subscriber. When you will you make a IOT base project ???
I'm currently work on IOT based project do you collabe with me please comment nd give me your e-mail address.
5:34 it should be
pinMode(in1, OUTPUT);
pinMode(in2, OUTPUT);
are you sure? Cause that's what I did and it didn't run, but when I changed those to INPUT it started to work, and now I'm baffled why. There is nothing in datasheet of bridge that would explain it ;(
awesome video. thank u very much
hi. what kind of mosfet did you use?
great tutorial!
thanks
Is it important for making Arduino car with out remote
would this kind of connection work if i add a routine loop coding and remove the joystick.
Of course. You can do that. You can even do things like use the sonar sensor to "look" for an obstruction, then program it to back up, turn, and move again.
Sir, Please teach or show me Arduino R3 with DC 3V-36V 15A Dual H-Bridge DC Motor Driver. You gave the best here
how are you powering the arduino? is it using the batteries? and when you upload the code to the arduino board does it store it?
Excuse me but
why do you config in1 and in2 as inputs? 5:32
Those control an H bridge so they should be outputs? You use digitalWrite() on them later
Well, it's a typo, they are outputs, that's right.
@@HowToMechatronics ok very good that's what I thought thanks!
Great video, thanks. I am setting up the car for my kid´s science class - if I am using 6 v circuit, all coding should be the same? Thanks!!
I will be using one these to make a gokart soon mwahaha. I'm going to craft the PWM around a foot pedal so I can adjust the speed with my foot
which programme did you use to draw the circuit diagram?
Hello
1) How do you think the code will be changed? if 1 motor uses to control left-right and 1 motor uses to move forward -backward?
2) do you think the code was without backward left and backward right situation?
4:12 my voice randomly when I hit puberty
5:31
Thanks for this instructional & educational video! May I check with you... could I use a normal disposable 9V battery instead to power up 2 smaller DC motors each rated about 4-6V?
If they are rated 6V you cannot use 9V, you might burn them.
a standard 9V battery has a capacity of about 500 mAh. This battery will be empty after 2 or 3 hour of use even with small motors. If you would like to use them anyway you need a DC-DCstep-down voltage-regulator to reduce the voltage down to 6V
In these examples are you removing the jumper for the pwm motor driver pins or not?
Why are the pins that change the directions of the motor written in the code as inputs? aren't they sending a signal instead of receiving?
They should be outputs.
May I know, what kind of software you used to draw the L298N + Motor + Arduino Board on the presentation slides, Would you let me know ? Thanks.
Te hago una consulta.. que motores me recomendas de 12 o 24 v para mover un equipo de 40 kg de peso distribuido en 4 ruedas
could the joystick be replaced by a receiver for wireless input. Great video btw :)
I have one similar project but with a 5v motor and a 5v power suply, how can I connect the power suply to both arduino and motor and leds, cause if I conect via USB and it runs slow
Luis Pires have you found an answer to that problem? I’m trying to figure out the same thing
Great tutorial. Thank you! Can be added collision sensor switch module to last project ( L298N+Joystick)?
Can this be used to run a DC motor with higher voltages such as 72 volts and 100amps or higher?
what can be done to make it work?
I am looking for the same answer. Please let me know if you find answer to your problem.
100 Amps is way too high and some motor drivers like sabertooth are there which can provide around 60 amps but they cost a lot. So check for a motor driver which supplies your required current
@@2305989 I was thinking that this can be used to control MOSFETS and not motors. And so for the high AMPS, the MOSFETs should be able to handle those.
Valeu um Link e uma inscriçao, Parabens pelo video
Great video,what did you use for a 12v power supply?
3 18060 2400 mah battery
Is it possible to make it turn into an autonomous car?
@howtomechatronics Please what software or program did you use in creating the electrical connection animation?
In the website notes regarding the L298N you say: "In this case the 5V pin will be used as input as we need connect it to a 5V power supply in order the IC to work properly." But in your schematic diagram nothing is connected to the 5V pin. And it looks like the Arduino is being powered by the same 12V battery that is powering the 2 motors.
is it works If i use 12V battery and attach two 6v dc motor? please explain why?
Are you using protected 18650 batteries?
can we connect 3 DC motors to L298 and connect it to Arduino?
Won’t reducing the voltage also reduce the torque?
How did you connect the jumper wires to the battery bay and Arduino board?
Does it Works with a l293d too?
Yes, it would but code would differ.
Question. Besides the L298N driver max 2 ampere. Wich type of Arduino board are you using or do you advise using in your DC motor control ?
The "Uno R3"
The "Mega 2560"
or
The Arduino NAno 33 i/o