Robotics 2 U1 (Kinematics) S2 (Denavit-Hartenberg) P2 (Frames)

ฝัง
- เผยแพร่เมื่อ 29 มิ.ย. 2024
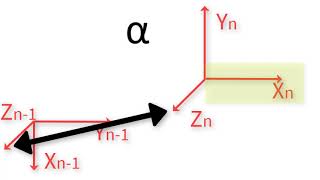
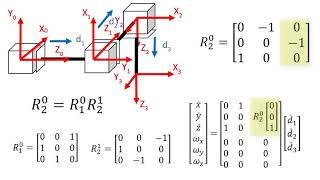
- In this video, you are given the four rules for assigning frames according to the Denavit-Hartenberg method for forward kinematics.
Robotics 2 is a college-level intermediate robotics class covering kinematics, motion control, machine vision, and artificial intelligence.
For complete curriculum and to get the kit used in this class, go to www.robogrok.com


![[HIGHLIGHT] หมีLIVEปะ? | EP.171 เห็นแต่ในจอ วันนี้มาต้องขอคารวะ](http://i.ytimg.com/vi/gPWLxa0e_Z8/mqdefault.jpg)
![LISA - ROCKSTAR (Official Music Video) REACTION [SHE'S BACK!]](http://i.ytimg.com/vi/QBxE30vavMQ/mqdefault.jpg)
![[MIRRORED] LISA - ROCKSTAR 🎸 MV version #LISA #BLACKPINK #ROCKSTAR](http://i.ytimg.com/vi/-U58DuCCtZk/mqdefault.jpg)


Spent 80k to go college just to self study ;) I would rather paid u 80k for my education. Was killing myself before coming across your video. Really excellent video, solve all my doubts!
I'm preparing for a test on the D-H method and honestly, I really wish my lecturers were half as clear and kind as you are! Thank you so so much Angela! God bless you immensely and when I pass, it will all have been because of you :)
Thanks Angela. These courses are really detailed I've ever seen.
Hello Angela.Thank you for this brilliantly thought through and produced video.
Thank you for taking the time to explain so well! Really appreciate it! :)
You are the best in explaining the frames, thanks alot 👏🏻
This video is awesome!!
Great explanation.
Thank you for helping me understand this topic by providing a good visual representation.
Thank you so much your explanation style is brilliant
Really good job ,a big thanks 😊
Thanks for your excellent teaching method.
Wooow thank you so, so much ! Your explanation is 10/10 !!
Simple and didactic video, tanks a lot.
This was super helpful!
Very informative!
Wonderful explanation 👌
GOD bless you, I was confused about the DH parameters and how to identify them I have read some books and none of them explained the way you described it.
thanks angela it is very useful video for us
Thank you alot, you help me so much.
Hi Angela , ( at 14:52 ) if i change the position of the second joint about the X1 direction ( i want to second joint position on top of the first joint ) , is anything change in DH or not ?
İ think its okey , because also x1 axes perpendicular to z0 axis , just changing displacement the second frame and end effector frame
Thank you for your time
I need a Denavirt Hartenberg board of this example, really need!!! Because I am working on the same but cant find the true forward kinematic for it. As you can see, joint 0 and joint 1 are not lying on the same line. There is a small (I would call) "offset" between these two joints, which makes it different between those examples I have done. Cant manage to find the right forward kinematic answer. Pls help! Thanks
Thankyou thankyou Thankyou!!!!!
Hi Angela. At 11:00 of the video, you have X3 "up", the same as X2 which is your general convention for the end-effector frame, that is mimicking the previous frame when possible to make the math easier. Yet at 11:03 in the 3D model , you changed X3 to be "out of the page". Why did you do that? I realize that in the 3D model in this changed position is legal according to the DH requirements, but it kind of threw me off and was wondering if there is something that I'm not understanding. Can you please explain? Thank you!
..then 15 15:20 X3 is back in it's original position (i.e. back where it was at 11:00).
Finally, in the next video (Robotics 2 U1 (Kinematics) S2 (Denavit-Hartenberg) P3 (Parameter Table) ), X3 is back to being "out of page" . It's mostly confusing just because of the inconsistency for us new to DH.
Should we do Xi = Zi-1 x Zi ?
I've liked these videos so hard! 😂 😂
hätte meinen Prof alles so erklärt,würde ich mich bei ihm bedanken...
So, i watched the next video and if i change the position of the second frame to the top of the joint 1 , just a2 get lost and a3 is bigger that previous , is that right please give me feedback , have a nice day
That is right and a better way to do it
Hi Angela, nice content. Do you authorize the download and use in a robotics educational simulator? Thanks!
@curtin
What software did you use? for the 3d model
3D builder (comes with Windows 10)
@@asodemann3Thanks for sharing, I'd the same question.