روبوتية: شرح طريقة تحديد محاور الإحداثيات لروبوت ستانفورد

ฝัง
- เผยแพร่เมื่อ 4 ต.ค. 2024
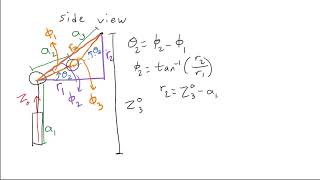
- تحديد محاور الإحداثيات لروبوت ستانفورد
شرح تحديد البارامترات الهندسبة لروبوت ستانفورد
• روبوتية: شرح تحديد الب...
• روبوتية: دراسة النموذج...
رابط دراسة النموذج الهندسي العكسي لقاعدة الروبوت الجراح دافنشي
• روبوتية: النموذج الحرك...
النموذج الحركي المباشر لقاعدة الروبوت الجراح دافنشي
• روبوتية: طريقة حساب ال...
طريقة حساب البارامترات الهندسية للانتقال من جملة إحداثيات إلى أخرى مع مثال للتوضيح
• روبوتية: النموذج الهند...
النموذج الهندسي العكسي والمباشر لروبوت بسيط بمفصلين
#Davinci
#Robotics
#دافنشي
#الروبوتية
#ربوبوت_دافنشي
#الهندسي_العكسي
#الهندسي_المباشر
#IGM
#DGM
#Direct_Geometric_Model
#Inverse_Geometric_Model
#Kinematic_Geometric_Model
#روبوتية
#روبوت








عشت حبي بس كون انجح
بدنا فيديو عن تحديد مسار الروبوت
حياكم الله، حالياً اعتذر لضيق الوقت، ممكن يكون لاحقاً إن شاء الله. 💐