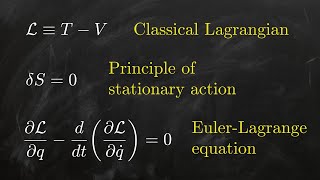
Lagrangian Mechanics II: Degrees of freedom, generalized coordinates and a cylinder

ฝัง
- เผยแพร่เมื่อ 10 ก.ค. 2024
- #Physics #Lagrangian #Mechanics
Sorry about the wait! I hope the audio is bearable. The voiceover is by far the hardest part to get right and I'm still experimenting with how to make it better. I'm also hoping to be able to get a new mic soon.
---------------------------------------------
In this video, we introduce the ideas of degrees of freedom and generalized coordinates, before deriving equations of motion for a cylindrical pendulum.
For the best viewing experience, make sure to watch in full-screen and with 4K (2160p) resolution.
Music in the background from www.FesliyanStudios.com
Blackboard image by Gerd 'geralt' Altmann at pixabay.com/sv/users/geralt-9...
00:00 Quick recap
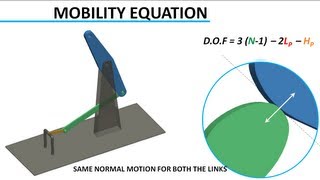
00:32 Degrees of freedom for a rigid body
04:24 Choosing our coordinates
05:50 Deriving the Lagrangian
10:46 Applying Euler-Lagrange
12:00 Outro discussion



![[4K] BABYMONSTER(베이비몬스터) “FOREVER” Band LIVE Concert “영원히” 베몬만을 사랑하게 되…💗 [it’s KPOP LIVE 잇츠라이브]](http://i.ytimg.com/vi/TQfC0xdpiw4/mqdefault.jpg)



Just finding this series now, it’s absolutely amazing. Thank you so much!!
Helped me grasp what I couldn't in classroom. Thank you!
thank U so much, i'm waiting for standard Lagrangian and non-standad Lagrangian😊
Him: "And that is how we found the Kinetic Energy by making many restrictions~"
Me: "... That is one big equation for a super simple problem."
Also, Amazing series btw. Can I ask how you create these beautiful animations?
Thank you again!
noo clifhanger
the audio is not bad at all! epic videos
Thanks, glad to hear it! I'm probably just tired of hearing my own voice after editing...
Thank you very much .....I m waiting for Hamiltonian mechanics.
I think the difference between Lagrangian Mechanics and Hamiltonian Mechanics is that Lagrangian Mechanics uses "Position and Velocity", whereas Hamiltonian Mechanics uses "Position and Momentum"... My only example is Schrodinger's Equation and I'm only an Electrical Engineering student so take my comment with a grain of salt...
Amazing lectures. What software do you use to make these graphical geometries?
Really nice video. I have a suggestion for the animations in future videos, but please feel free to ignore it as it involves more work for you!
I really like the way you substitute terms from one equation to the other by flying them in, e.g. the RHS for T and V fly into place in the RHS of L=T-V. This makes it very clear what trivial mathematical manipulations you are doing. Slightly less trivial steps are things like the simplification of terms, pulling out common factors, use of trig identities etc. It may be useful for people to see exactly which terms you are working on by dynamically moving them around. Take for example at 9:05, it may be useful for someone to see which terms you are grouping, by flying them down from the first equation for v_cm^2 to the second equation.
Again, this is just a small suggestion, so please ignore it if you don't feel it's necessary to chase down that last 0.1% of quality. The presentation is very clear and lucid as it is.
Looking forward to the next one!
This is very useful feedback, thank you! I've been building functions for all the manipulations of expressions, printing PNGs of the frames etc. from scratch in MATLAB (it's the environment I'm most comfortable with as a former engineering student), and I'm always trying to find ways to improve stuff. So getting input like this really helps.
I will definitely try to implement something like what you suggest.
@@physicsfluency5541 wow, in MATLAB? I wouldn't even know where to start!
I'm sure you already know about the Manim python library that 3blue1brown uses for procedurally generating his animations? I don't know whether it is any easier to use, and of course you have already taken the time to develop your own functions and workflow. But I mention it just in case you have a look and find it useful 😉
@@jms547 I do indeed get a lot of inspiration from 3blue1brown! But it does feel like he's way ahead in terms of manipulating latex expressions... I might take a look at some manim code to get a few ideas on how to go about it. The Python and MATLAB languages are kind of similar and I have done some smaller stuff in Python so I can usually understand the code without issues.
@@physicsfluency5541 Python has the advantage of WAY more libraries and much broader applicability. I'd say it's certainly worth spending some time to become fluent in. Loving the videos, looking forward to more! :)
This must be awesome... commenting beforehand
Hi! I like your videos very much! You should have way more subscribers. So you made MATLAB routines for animating equations? I program in Octave, which is almost the same except for performance. Would you be ok with sharing some of your routines with me? I also have a small channel and thought about making a program for animations but haven't yet gotten to it. I also don't have much time but if I made any interesting changes I would share it back, of course. Hope it's not too much to ask. Thanks!
Thank you, I hope more subscribers will gather if I keep making decent content! I would be more than ok to share my stuff, but I'm currently trying to overhaul the fundamental structure a bit, so it is sort of a mess at the moment, hopefully not for long though. Once I have things more under control I can put together a zip for you if you want.
@@physicsfluency5541 Yeah, no hurry! Since last night I have been thinking on ways to program animations on formulas. If you don't mind my rambling: One way would be to write the formula in any editor, make a .png or .jpg and then manipulate that with matlab/octave. That would require an easy/fast way of marking the start and end of the different parts of the .jpg matrix. And it would be limited to certain types of manipulation. But another would be to manipulate latex code that prints the different formulas. Last time I used Latex it was in 2007/2008, and I don't know how much latex can be manipulated from inside matlab. Just thinking out loud...
@@niconeuman I'm pretty much doing it the second way, by directly updating the positions of text objects (rendered using latex) in a figure window. Positioning is a bit tricky to figure out, since to move individual parts of an equation around I'm forced to write each part as it's own text object and then it of course doesn't recognize other parts of the equation automatically, which creates alignment issues... but I feel like I'm getting the hang of it.
Hey I have a question, what would be different if we decided to use a polar coordinate system? How would you construct the cg position vector and would differentiation change in any sense for the Euler Lagrange equations? Maybe the Jacobian would get introduced in some form?
I can't say how practical it would be, but It's an interesting idea, for sure! I think the main difference from a vector calculus perspective is that the unit vectors in a polar system are themselves functions of position (see for example en.wikipedia.org/wiki/Polar_coordinate_system#Vector_calculus ) as opposed to the static unit vectors of a cartesian system. This means that we would have to differentiate the unit vectors, as far as I can tell.
@@physicsfluency5541 I remember in taylor's physics book, when using polar coordinates in some problems, having to use the product rules of differentiaton to do derivatives of vectors cus we couldn't get away with treating each coordinate as separate (since the basis vectors weren't constants)
For the rotational kinetic energy you used the moment of inertia about the cylinders center of mass. Why didn't you then apply parallel axis theorem to get the inertia about the pivot point? Since this cylinder is not rotating about its center of mass.
Good spot!
Due to the change in magnitude of the center of mass's location over time, inertia also changes over time
Im slightly confused as to what you are getting at. The center of mass location is dependent on time, but the magnitude of the center of mass itself is time independent, therefore the inertia about the center of mass is time independent. You may be thinking of the rotational kinetic energy term, which is time dependent due to the angular velocity component, theta dot squared. What I was pointing out was that in the video the author uses the center of mass inertia when building the lagrangian, but his object is rotating about a pivot point at the top of the cylinder, therefore he should have used parallel axis theorem to find the inertia about the pivot point.
great video by the way! Loved the animations@@jamesquigley4837
@@auden7560 you are right this cylinder rotates about the pivot point and this rotation is represented by using theta 1 but this cylinder also rotates with theta 2 and the rotational kinetic energy can be calculated using theta2. so using the center of mass inertia makes sense because of the change in angle theta2. You can't ignore the second theta because the system has 2 dof. Shortly, the Pivot point doesn't affect rotational velocity but the end of the spring ( top point of the cylinder) effects
𝙥𝙧𝙤𝙢𝙤𝙨𝙢 😈
Excellent content. Hate the music.