TH-cam
US
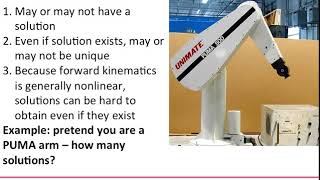
Intro2Robotics Lecture 8: Inverse Kinematics
19:42
6 Axis Robot Forward & Inverse Kinematics Tutorial - Denavit Hartenberg Parameters With the AR4-MK2
1:41:55
Intro2Robotics Lecture 7b: Forward to Inverse Kinematics example
12:32
🔴LIVE โหนกระแส ศึกชิงมรดก 500 ล้าน ทายาทฟ้องเด็กรับใช้ปลอมลายเซ็น
2:13:31
🔴LIVE สด! PGC 2024 ศึกชิงแชมป์โลกพับจี Circuit 3 วันที่ 1
5:28:15
ถ้าต้องทำ การบ้าน ตลอดชีวิต? คุณจะเลือกแบบไหน!
00:18
Intro2Robotics Lecture 7c: Forward to Inverse Kinematics example
Aaron Becker
ติดตาม
4.8K
ดาวน์โหลด
โหลดลิงค์.....
มุมมอง 9 419
0
0
เพิ่มลงใน
เพลย์ลิสต์ของฉัน
ดูภายหลัง
แชร์
แชร์
ฝัง
ขนาดวิดีโอ:
1280 X 720
853 X 480
640 X 360
แสดงแผงควบคุมโปรแกรมเล่น
เล่นอัตโนมัติ
เล่นใหม่
เผยแพร่เมื่อ 10 ม.ค. 2025
ความคิดเห็น • 10
ต่อไป
เล่นอัตโนมัติ
19:42
Intro2Robotics Lecture 8: Inverse Kinematics
Aaron Becker
มุมมอง 9K
1:41:55
6 Axis Robot Forward & Inverse Kinematics Tutorial - Denavit Hartenberg Parameters With the AR4-MK2
Chris Annin
มุมมอง 34K
12:32
Intro2Robotics Lecture 7b: Forward to Inverse Kinematics example
Aaron Becker
มุมมอง 44K
2:13:31
🔴LIVE โหนกระแส ศึกชิงมรดก 500 ล้าน ทายาทฟ้องเด็กรับใช้ปลอมลายเซ็น
โหนกระแส [Hone-Krasae] official
มุมมอง 960K
5:28:15
🔴LIVE สด! PGC 2024 ศึกชิงแชมป์โลกพับจี Circuit 3 วันที่ 1
PUBG: BATTLEGROUNDS THAILAND
มุมมอง 157K
00:18
ถ้าต้องทำ การบ้าน ตลอดชีวิต? คุณจะเลือกแบบไหน!
GennoRing
มุมมอง 468K
5:32:25
Live! ถ่ายทอดสดหวย ถ่ายทอดสดการออกรางวัลสลากกินแบ่งรัฐบาล งวดวันที่ 16 ธันวาคม 2567
เรื่องเล่าข่าวร้อน
มุมมอง 347K
17:58
The Incredible Strength of Bolted Joints
The Efficient Engineer
มุมมอง 3.3M
15:46
Frame Assignment For Robotic Manipulators - Direct Kinematics I
ThatsEngineering
มุมมอง 98K
2:43:35
Body Language Expert: Stop Using This, It’s Making People Dislike You, So Are These Subtle Mistakes!
The Diary Of A CEO
มุมมอง 7M
26:12
How to Remember Everything You Read
Justin Sung
มุมมอง 2.4M
58:52
Inverse Kinematics of a 6-DoF Industrial Robot (Yaskawa GP12)
Arun Dayal Udai
มุมมอง 10K
13:29
Inverse Kinematics of Articulated Manipulator
Angela Sodemann
มุมมอง 84K
57:45
Visualizing transformers and attention | Talk for TNG Big Tech Day '24
Grant Sanderson
มุมมอง 306K
15:54
How Robots Use Maths to Move
James Bruton
มุมมอง 469K
22:21
Why do prime numbers make these spirals? | Dirichlet’s theorem and pi approximations
3Blue1Brown
มุมมอง 6M
55:01
ช้างศึกโดนก่อน ไล่ยิงคืนสิงคโปร์ ทะลุน็อคเอาท์
ฟุตบอล108
มุมมอง 101K
08:12
คอมเมนต์แฟนเวียดนามสุดทึ่ง หลังไทยเกือบหลับแต่กลับมาได้ พลิกนรกคว้าชัยเหนือสิงคโปร์ 4-2 แบบสุดมันส์
Farangthink
มุมมอง 95K
00:56
หลอกเพื่อนจับอึ #funny #แกล้ง #แกล้งเพื่อน #อึ #เพื่อนแกล้ง #ละคร
โฟกัสแอนด์ฟิล์ม แฟมมิลี่แก๊งค์
มุมมอง 367K
4:08:46
Live!🔴 สิงคโปร์ VS ทีมชาติไทย เชียร์สดฟุตบอลฟุตบอล ASEAN Mitsubishi Electric Cup™ 2024
Thairath Sport
มุมมอง 555K
1:32:40
ซินเดอเรลล่ากลายเป็นภรรยาของลุงสุดหล่อหลังจากคืนโรแมนติกนั้น ไม่รู้ว่าเธอได้พบกับมหาเศรษฐี
Shop ละคร
มุมมอง 1.4M
21:52
#นายกแพทองธาร ลงพื้นที่มอบถุงยังชีพ บริเวณ ซ.พัฒนาการคูขวาง ๑๐ (ถ.ท่าโพธิ์) จ.นครศรีธรรมราช
VOICE TV
มุมมอง 119K
2:40:50
LIVE🔴 : Cambodia vs Timor-Leste | ASEAN Championship 2024 | 17.12.24
BG SPORTS
มุมมอง 438K
04:21
เดี่ยว - วันที่ได้คำตอบ - Live Show - The Voice Thailand 2024 - 15 Dec 2024
The Voice Thailand
มุมมอง 1.8M