Modern Robotics, Chapter 8.1: Lagrangian Formulation of Dynamics (Part 1 of 2)

ฝัง
- เผยแพร่เมื่อ 24 ต.ค. 2017
- This is a video supplement to the book "Modern Robotics: Mechanics, Planning, and Control," by Kevin Lynch and Frank Park, Cambridge University Press 2017. See modernrobotics.org for information on the book, free software, and other materials.
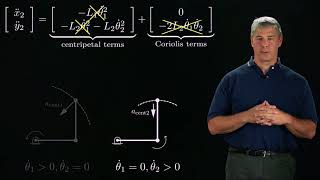
This video introduces the Lagrangian approach to finding the dynamic equations of motion of robot and describes the structure of the dynamic equations, including the mass matrix, velocity-product terms (Coriolis and centripetal terms), and potential terms (e.g., gravity).
This video is a brief summary of material from the book, and it is not meant to stand alone. For more details, such as an explanation of the notation, please consult the book and the other videos.
Playlist for Chapter 8: • Modern Robotics, Chapt...
Playlist for all book videos: th-cam.com/users/playlist?list...
TH-cam channel with all playlists: / kevinl2145
Wiki for the book, including software and other supplements: modernrobotics.org
Modern Robotics is now a series of online courses on Coursera! www.coursera.org/specializati...







These videos have given me a lot more respect for mechanical engineers as an electrical engineering student. This math is pretty tough!
An amazing explanation, thank you!!!
excellent video. I checked the math and it makes a lot more sense to me than some of the other papers I have read.
Maybe you read the derivation of the langrange equations, i mean, understanding why this formulas must be true. That part is not really intuitive i think.
Thank you so much for your Effort!! YOUR VIDEOS helped me a lot
Excellent explanation, thank you!
this super clear, thanks
how did you get L comp sir (referred book still not clear)
What are the advantages of DH convention over analytical method of frame transformation matrix and transformation? Sir , please solve this question?
Sir,kindly upload the Lagrangian formulation of two leg robot
Thank you sir
if we have a 3d articulated robot, v=(xdot+ydot+zdot)???
Where do you get the Lcomp from? please be more specific
In the torque equation at 5:05 it should be c(theta)*theta dot instead of c(theta, theta dot) right?
Sir can you drive the same for three link
can you please explain ? why didnt you consider kinetic energy of mass due to rotation ? thank you
+1
+1
I'm not entirely sure but the reason may be that since all the mass is concentrated on a single point for each link, the inertia tensor will have a 0 value thus cancelling out the rotational part. Correct me if I'm wrong.
mass center points m1 & m2 are wrongly picked. they supposed to be in the very middle of the each link if material of the link is homogenous, if not, it is still impossible to pick those points w.r.t. laws of physics.
Or you just assume the links to massless with a mass on the very end of it, similar to a frictionless pendulum with a massless rod
Yes Thank you, I was confused too
Love when novices chime in
Best
👍
로봇제어 과목 수강생은 이 영상을 보러 올것이다
어이 ㄱㅇㅎ이~~
ㄹㅂㅎㅂ 정모ㅋㅋ
개추
오늘따라 떡국이 먹고싶군요...
왔다 갑니다.
@@Happyman30 떡국 좋지요 ㅎㅎ 사천식 떡국 기대하겠습니다
@@kwon_line 다시다 넣습니다.
I swear this thing is giving me the creeps
th-cam.com/video/c2qHQqM1tfU/w-d-xo.html
hey dont disrespect the supreme leader called Mr Le Grange from dmc ait class, come on!! he has a PTSD in random technology crap and he has a million dollars in debt i mean assets! 💩
At the slide showing the taus there is a mistake
The 2nd row of tau2 should be
-m2*L1*L2*sin(theta2)*theta2_dot*theta1_dot
oh poo.... aerodynamics simulation....