16 | Program an angle mode flight controller in Arduino

ฝัง
- เผยแพร่เมื่อ 16 พ.ค. 2024
- Full code and manual on GitHub: github.com/CarbonAeronautics
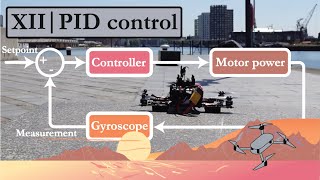
In this video, you will learn how you can program an angle mode flight controller for your drone from the angles calculated by the Kalman filter.
The purpose of this video series is to learn the basics behind a quadcopter drone and enable you to build one yourself, by dividing this challenging project in several easy-to-understand parts. You use the capable Teensy 4.0 microcontroller together with the easy-to-use Arduino language. - วิทยาศาสตร์และเทคโนโลยี








This channel is really underrated. well done mate
This channel is really underrated. Well done, mate. ( I agree because I can not find any information like this) Joop Brokking YMFC-32 has some great information on his drone builds but not the mathematical information CA has in the manual.
well done mate. great job !!!!
Thanks for taking effort .
Thanks! Just one question from this video: you mentioned setting the I and D term to zero for the angle loop, and said you would explain later - I didn't see the later explanation? Apologies if I missed it!!
i think it would be very interesting if this learning video was continued to make the flight controller mode way point. btw thanks bro👍
We'll see if i get to this point, but would be nice indeed! First we'll need to implement a GPS which was not foreseen initially, so let's see!
Extraordinary, but you are a genius of old school, because your system is a MONOLITHIC one! please continue in direction of way point! here you could stop or continue if you want! I have enjoyed the mathematical precision!
Without way point (not more) is your genial work incomplete!
(I know the genial work of Joop Brokking YMFC-32 very well!)
How did you change the PID constants as i am seeing two loops here. Can you explain or give me some advice please?
what was the reasoning behind proportionality constant of 2 for angle controller?
Thanks!
Can we get the yaw?
I'm wondering, what are the reasons to use a double loop instead of directly controlling motor speed from Kalman angle error ?
Good question. The rotation rate measured with the gyroscope changes much faster than the angle measured with the accelerometer. As such, you need the very responsive inner loop based on the rotation rate to balance the drone. If you would directly control the motor speed with the angle error, the response will be too slow to balance the quadcopter
@@carbonaeronautics Thanks a lot for your answer !
However, the MPU6050 has a 1000Hz refresh rate for the accelerometer, shouldn't that be responsive enough for a 250Hz PID controller ?
In practice, I'm currently trying to make it work with a single loop and it's pretty unstable so I will probably try 2 loops soon, but I'd still like to understand why it's not good enough
Hello, if all roll, pitch, and yaw inputs must be 1500 for 0 movement, what should the total input to motor 1 be? If we had a throttle value between 1000-2000, motor 1 would never start. Can you please guide me through this? How should I deal with the motor mixing algorithm?
You you the a look at the flight controlling code, you will see that the common variable on all 4 motors is the throttle input from the rxtransmitter.. hence, if there is no movement on pitch, toll or yaw of the transmitter, , with a good pid tuning values, all those motors are to have the same value promotional to the throttle stick position.
That only, ofcz, if the quadcopter as well, isn't moving.
So the throttle is the common denominator for all motors.
i can't find the full code on github please someone help
i can hear the motors suffering from high frequency noise in the gyro data because u didnt care about filtering. isnt motors and esc s hot?
I did not experience issues with the motors and ESCs. The gyro measurements are in fact filtered through the low pass filter, that we set to 10 Hz in register 1A of the MPU6050 (see part IV).
Servo mashina e giraskop da
Please share the Angle Flight Controller code on github
I've uploaded it just now: github.com/CarbonAeronautics/Part-XVI-FlightControllerAngleMode
@@carbonaeronautics Thanks
There are two PID’s for angle and rate, so which pid values I have to tune