Im a bit confused. In an older video with spherical manip. you did not move the locations on frame 2 like @10:56. Does this lead to same results? (Video is 1 1 4 Lecture Video 1 of 2 Displacement Vectors)
The angle of the second revolute joint is between frames 1 and 2, not between frames 2 and 3. So, the joint angle shows up in d1_2, not in d2_3. Otherwise, you would be accounting for the angle twice and that would give the wrong result.
in this video i am confused between example 2 and 3. in the example 2 the link(a2) betwen(two revolute joint) frame 1 and 2 has a displacement vector respect to theta2 rotation. but in example 3 the link(a2) between( revolute?spherical joint and prismatic joint) frame 1 and 2 there is no displacement vector even there is a bare theta2 rotation?
Hey, Thanks for your videos. @11:46 As theta 2 rotates along the z-axis, y-axis and x-axis should move with the same angle and therefore frame 2 should change the position, No?
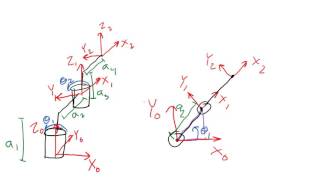
I'm not totally sure I understand your question, but maybe this will help: As theta2 changes its value, frame 1 doesn't move at all - it neither rotates nor translates. Frame 1 is only affected by the motion of theta1. But, frame 2 will both rotate and translate as theta2 moves, because frame 2 is physically attached to the third joint. For example, when theta2=90 degrees, the center of frame 2 will be directly above the second joint, and the x2 axis will be pointing straight up, and the y2 axis will be pointing to the left. But, the 1 frame won't have changed at all; y1 will still be pointing up, and x1 will still be pointing to the right.
In some of the examples in this video, there is rotation between frames 1 and 2, and in some examples there is not. But, this video is only about the displacement between the frames, not the rotations.
Thanks for a quite fast answer, Can I get some help one more question? when moving from frame 1 to frame 2 why are there both a1 and d1? (@1:56 ) Isn't it enough to use a1? I'm confused about d1.. Thanks
a1 is the distance between the two joints when the joint has not extended at all, and d1 is the amount that the joint has extended. So, for example, suppose that the linear (prismatic) joint is a rack and pinion like we use in the motion control videos in this class. When the rack is pulled all the way back as far as it can go, to its 0 position, there might still be some distance between the joints. That distance is a1. Then, the amount that the rack and pinion moves, extending the joint, is d1. So, the total distance between the two joints is a1+d1.
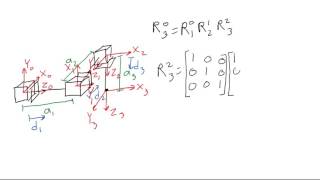
One of the Denavit-Hartenberg frame rules is that each X axis has to intersect the Z axis in the frame before it. We always first try to keep this rule by changing the direction of the X axis. But, in this case there is no direction that the X2 axis could be so that it would intersect Z1. So, we have to move the center of the frame back (along the Z2 direction) just far enough so that X2 will intersect with Z1.








in 2024 this video series is still the best i have seen. Nice Legacy ma
better then udacity... thank you mam
Im a bit confused. In an older video with spherical manip. you did not move the locations on frame 2 like @10:56. Does this lead to same results? (Video is 1 1 4 Lecture Video 1 of 2 Displacement Vectors)
Alright now i get it but does that mean that the other video is wrong? Since rule 4 will never happen however we rotate around z?
You are the best
Hello..
In 12:22 why the d2_3 =[0, 0, a2+a3+d3] and not d2_3=[(a2+a3+d3)sin∆2, 0, (a2+a3+d3)cos∆2]
Thanks
The angle of the second revolute joint is between frames 1 and 2, not between frames 2 and 3. So, the joint angle shows up in d1_2, not in d2_3. Otherwise, you would be accounting for the angle twice and that would give the wrong result.
@@asodemann3 ... Thanks a lot for this great course...it is really helpful
That means ,there is no effect of theta 2 for displacement …theta 2 wasn’t used in any displacement matrix
Thank you mam
in this video i am confused between example 2 and 3. in the example 2 the link(a2) betwen(two revolute joint) frame 1 and 2 has a displacement vector respect to theta2 rotation. but in example 3 the link(a2) between( revolute?spherical joint and prismatic joint) frame 1 and 2 there is no displacement vector even there is a bare theta2 rotation?
In the first example when the system moves from Z0 to Z1 why is that frame rotated now. The X, Y and Z axis seems to have rotated.
same question
Thank you madam
Hey, Thanks for your videos.
@11:46 As theta 2 rotates along the z-axis, y-axis and x-axis should move with the same angle and therefore frame 2 should change the position, No?
I'm not totally sure I understand your question, but maybe this will help:
As theta2 changes its value, frame 1 doesn't move at all - it neither rotates nor translates. Frame 1 is only affected by the motion of theta1. But, frame 2 will both rotate and translate as theta2 moves, because frame 2 is physically attached to the third joint. For example, when theta2=90 degrees, the center of frame 2 will be directly above the second joint, and the x2 axis will be pointing straight up, and the y2 axis will be pointing to the left. But, the 1 frame won't have changed at all; y1 will still be pointing up, and x1 will still be pointing to the right.
That's a articulated joint having same center's they don't displace
@ Angela Sodemann
Isn't it there rotation between frame 1 and 2 (first and second)?
In some of the examples in this video, there is rotation between frames 1 and 2, and in some examples there is not. But, this video is only about the displacement between the frames, not the rotations.
Thanks for a quite fast answer, Can I get some help one more question? when moving from frame 1 to frame 2 why are there both a1 and d1? (@1:56 ) Isn't it enough to use a1? I'm confused about d1.. Thanks
d1-> how much the joint move
a1-> distance between frames when d1=0
I thought both are same, What am I missing?
a1 is the distance between the two joints when the joint has not extended at all, and d1 is the amount that the joint has extended. So, for example, suppose that the linear (prismatic) joint is a rack and pinion like we use in the motion control videos in this class. When the rack is pulled all the way back as far as it can go, to its 0 position, there might still be some distance between the joints. That distance is a1. Then, the amount that the rack and pinion moves, extending the joint, is d1. So, the total distance between the two joints is a1+d1.
Thanks again, I don't figure out yet but I try to understand those watching videos repeat! Thanks for awesome lectures :)
@10:56 why do you change the location of frame 2?
One of the Denavit-Hartenberg frame rules is that each X axis has to intersect the Z axis in the frame before it. We always first try to keep this rule by changing the direction of the X axis. But, in this case there is no direction that the X2 axis could be so that it would intersect Z1. So, we have to move the center of the frame back (along the Z2 direction) just far enough so that X2 will intersect with Z1.