I'm presuming, that there are four threaded blocks which run in slides along each face of the plate. Two for each threaded rod, so they can be pre-loaded, to eliminate the backlash. If the slides are linear rails, then the precision will be really quite good..
Nah it's even neater, if you take a close look at the slots that the screws go through you will see the teeth they engage with that run the width of the stage. They are toothed at 45degrees so if only one screw rotates the stage actually moves on a 45deg angle, both need to rotate to move along the traditional cardinal axes.
I feel like this is not a bad tradeoff for having the head only need to Z-travel, might be handy for very heavy or complicated extruders like 3-filiament extruders. I don't imagine it's super precise though, and you would need thick screws to get high rigidity.
@@anotherperson9646 On the other hand, the bed stays low in the configuration, meaning you can do a significant amount of stabilizing work into the base without needing a high-stability Z-axis, even if the Z has a relatively heavy head (lots of fans, direct drive extruder, multi-extruder, etc). Tall, thin prints would likely still pose some issues though. I personally like the inversion on this concept a couple of people have done using inverted-H-bot designs. You flip the printer upside down, put the hotend on the moving plate, and raise the print bed as you print. The key to this design is ensuring a very, very, very good bed adhesion, but a guy built one with 175mmx175mmx125mm build volume that folds down to fit into a 3d filament box. Bloody brilliant.
Maybe I'm missing something but why would you want to use this on a 3d printer ? For a fairly regular 300mm square bed the dimensions will be more than half a meter square area; instead of inertia artifacts on the x now we have them on the y also because bed moves on the two axes; also have some doubts on how fast this can go and still maintain some resolution. BTW how do you maintain zero backlash on the toothed profile ?
Is there any chance to speak with the designer of this ? I retro engineered this for a personal project, but I'm struggling so far with programming to have an easy way to control the motion of it =) Thanks
I'm not the original creator but I've been building a replica as well. We have a fork of GRBL with the right kinematic equations to control it! I haven't updated the documentation yet but this works well on ours: github.com/UIC-Makerspace/grbl-Spline-Drive let me know if you'd want to talk more about this!
@@uic_engineering_makerspace9791 Hi ! Ofc I'm interested. In my case I need the Arduino being able to do other stuff like read sensors etc... And I just need linear movements X and Y. So I managed smth like: for X movement (= motor A), and an 8mm leadscrew Motor A = x steps Motor B = -1 * x steps * (8 / (7.5 * PI)) This synchronized with accelstepper library and it works like a charm :) Do you have a 3d model of the table itself ? I think the most important part is how the leadscrew is interfacing with the table!
There are two motors with each a leadscrew. One motor is placed higher than the other so the two leadscrews can cross. Then in the platform, there is a tooth profile that can be seen on the edge where the leadscrew interfaces with the plaform. Turning the leadscrew then moves the platform.
This type of movement mechanism only has one use case: Mount like a 4x4 array of extruders on top and you can print 16 objects at the same time without needing to move all those toolheads. Otherwise useless.
this is a terrible way to go about 3d printing. its a huge inefficient use of space and as the print builds up it adds mass to the build plate and thus more momentum with each and every move which will lead to defects and artifacts in the print. who tf thought this up and who tf funded it? corexy systems are clearly the future as they use space efficiently and keep the print steady and actually decrease mass on the print head so you can print faster
High-precision devices like this are how actual machining, like that responsible for physical products people pay more than $10 for, is done. That you are mocking basic technology essentially required for FFF/FDM printers to finally reach the same basic playing field as hand-operated machines from the 19th century, without the ability to write like a fucking adult, is kind of hilarious. People have already built printers, using repurposed linear stages, that can handle over 500mm/s with 20,000mm/s2 acceleration. Years ago. Whatever issues you think would happen might actually present an issue, on a toy you buy from Aliexpress for $300, but the reason this is not a more common way of doing things is that a new precision linear stage is generally more expensive than most printers all on its own. Moreover, a design like this, because they're rigid enough to be unaffected by the forced involved in milling steel, could run on much more powerful motors which will barely even notice the mass of whatever plastic you could ever put onto it, in a closed-loop control system that would never 'skip' a step or lose its place, even if you deliberately tried to push it out of alignment. Look up everythingbends. They posted in depth about their printer, built primarily out of a cheap, unknowingly-broken, used linear stage, every step of the way as they built it. The thing is a work of art far beyond anything any corexy design has ever attempted.









I'm presuming, that there are four threaded blocks which run in slides along each face of the plate.
Two for each threaded rod, so they can be pre-loaded, to eliminate the backlash.
If the slides are linear rails, then the precision will be really quite good..
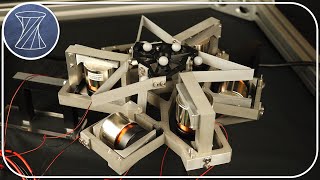
Nah it's even neater, if you take a close look at the slots that the screws go through you will see the teeth they engage with that run the width of the stage.
They are toothed at 45degrees so if only one screw rotates the stage actually moves on a 45deg angle, both need to rotate to move along the traditional cardinal axes.
nice idea, but the problem i see is you need at least double the printing surface area for the whole printer
Quadruple, in terms of footprint
I feel like this is not a bad tradeoff for having the head only need to Z-travel, might be handy for very heavy or complicated extruders like 3-filiament extruders.
I don't imagine it's super precise though, and you would need thick screws to get high rigidity.
quadruple
also a core xy would get the same result but nearly the same footprint for the print area
Another problem is that the mass of the bed and print is the load, with the print moving a lot
@@anotherperson9646 On the other hand, the bed stays low in the configuration, meaning you can do a significant amount of stabilizing work into the base without needing a high-stability Z-axis, even if the Z has a relatively heavy head (lots of fans, direct drive extruder, multi-extruder, etc). Tall, thin prints would likely still pose some issues though.
I personally like the inversion on this concept a couple of people have done using inverted-H-bot designs. You flip the printer upside down, put the hotend on the moving plate, and raise the print bed as you print. The key to this design is ensuring a very, very, very good bed adhesion, but a guy built one with 175mmx175mmx125mm build volume that folds down to fit into a 3d filament box. Bloody brilliant.
would it be possible to add also the translation on the z axis and the roll, keeping the motors and relative cables fixed in position?
Is this still available?
Maybe I'm missing something but why would you want to use this on a 3d printer ? For a fairly regular 300mm square bed the dimensions will be more than half a meter square area; instead of inertia artifacts on the x now we have them on the y also because bed moves on the two axes; also have some doubts on how fast this can go and still maintain some resolution. BTW how do you maintain zero backlash on the toothed profile ?
Taking bed slinging to a whole new level
Is there any chance to speak with the designer of this ? I retro engineered this for a personal project, but I'm struggling so far with programming to have an easy way to control the motion of it =) Thanks
I'm not the original creator but I've been building a replica as well. We have a fork of GRBL with the right kinematic equations to control it! I haven't updated the documentation yet but this works well on ours: github.com/UIC-Makerspace/grbl-Spline-Drive let me know if you'd want to talk more about this!
@@uic_engineering_makerspace9791 Hi ! Ofc I'm interested. In my case I need the Arduino being able to do other stuff like read sensors etc... And I just need linear movements X and Y. So I managed smth like: for X movement (= motor A), and an 8mm leadscrew
Motor A = x steps
Motor B = -1 * x steps * (8 / (7.5 * PI))
This synchronized with accelstepper library and it works like a charm :)
Do you have a 3d model of the table itself ? I think the most important part is how the leadscrew is interfacing with the table!
what is the cost of this product ?
Hi Mike. I need something like this. please help
Sir I am doing this project....Can you help us
What causes it to be zero backlash? Don't the Travelling contact surfaces wear out over time? If not please explain how that is possible?
Might be anti-backlash fittings. Springs maintain pressure in both directions on the lead screw.
It is as if you wanted to write by moving the page instead of the pencil.
Comment if u have any idea on how does this work... Thank u
There are two motors with each a leadscrew. One motor is placed higher than the other so the two leadscrews can cross.
Then in the platform, there is a tooth profile that can be seen on the edge where the leadscrew interfaces with the plaform. Turning the leadscrew then moves the platform.
Look up how an ultimaker works with crossed rods. This is that, but with leadscrews providing the motion
This type of movement mechanism only has one use case: Mount like a 4x4 array of extruders on top and you can print 16 objects at the same time without needing to move all those toolheads. Otherwise useless.
Nice useless toy.
this is a terrible way to go about 3d printing. its a huge inefficient use of space and as the print builds up it adds mass to the build plate and thus more momentum with each and every move which will lead to defects and artifacts in the print. who tf thought this up and who tf funded it? corexy systems are clearly the future as they use space efficiently and keep the print steady and actually decrease mass on the print head so you can print faster
High-precision devices like this are how actual machining, like that responsible for physical products people pay more than $10 for, is done. That you are mocking basic technology essentially required for FFF/FDM printers to finally reach the same basic playing field as hand-operated machines from the 19th century, without the ability to write like a fucking adult, is kind of hilarious. People have already built printers, using repurposed linear stages, that can handle over 500mm/s with 20,000mm/s2 acceleration. Years ago. Whatever issues you think would happen might actually present an issue, on a toy you buy from Aliexpress for $300, but the reason this is not a more common way of doing things is that a new precision linear stage is generally more expensive than most printers all on its own. Moreover, a design like this, because they're rigid enough to be unaffected by the forced involved in milling steel, could run on much more powerful motors which will barely even notice the mass of whatever plastic you could ever put onto it, in a closed-loop control system that would never 'skip' a step or lose its place, even if you deliberately tried to push it out of alignment.
Look up everythingbends. They posted in depth about their printer, built primarily out of a cheap, unknowingly-broken, used linear stage, every step of the way as they built it. The thing is a work of art far beyond anything any corexy design has ever attempted.
This modified video.Is not realistic!