What an amazing video! I am from Vietnam and we are doing a project related to your sharing. Could you please share with me the link to buy Nidec 24H brushless motor that you are using for your robots? TQ
We laughed hard at the cat's reaction. We also have cats and usually do voiceovers for them. Your cat was like "what the hell is this creature, should I struck it with a paw".
Great work, just got back into balance after earwig robot >10 yrs ago and making a cubli now with simple foc , I need to watch more of your vids. subscribed.
I see from the code that motor 1 is the real wheel. Is motor 2 the one below the controller or does it not matter? Thanks again for the great work and very cool project!
Thanks! By the way, I just finished building your self-balancing cube. Probably the best geek-toy I've ever built! Your Thingiverse files were outstanding. Downloaded, printed and everything went together and fit perfectly. Sent you a thingiverse-tip to buy yourself a cup of coffee! Thanks again.
The rotation itself is not necessary. This is an unnecessary side effect. Motor tries to turn the wheel, which has mass, and gets a torque in opposite direction. A heavier wheel is better. But it cannot be very heavy, so need to choose within some limits.









So cool! Your designs are always so neat and well tuned.
What an amazing video! I am from Vietnam and we are doing a project related to your sharing. Could you please share with me the link to buy Nidec 24H brushless motor that you are using for your robots? TQ
We laughed hard at the cat's reaction. We also have cats and usually do voiceovers for them. Your cat was like "what the hell is this creature, should I struck it with a paw".
Good job! You keep making great designs
Great work, just got back into balance after earwig robot >10 yrs ago and making a cubli now with simple foc , I need to watch more of your vids. subscribed.
This's another great project!😮🎉
Your projects are amazing! Please share a link, to buy the nidec Motors. Thank you!
I see from the code that motor 1 is the real wheel. Is motor 2 the one below the controller or does it not matter? Thanks again for the great work and very cool project!
Motor 2 is under the battery.
Thank you!
Can it balancing without wheel?
Only two perpendicular reaction wheels like this setup and point contact ?
Like this? th-cam.com/video/4gS2i5fecFE/w-d-xo.html
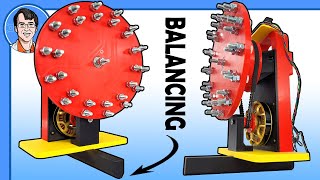
What are the size of the screws/nuts that you used in the outer ring of the reaction wheels?
M4 12-16mm.
Thanks! By the way, I just finished building your self-balancing cube. Probably the best geek-toy I've ever built! Your Thingiverse files were outstanding. Downloaded, printed and everything went together and fit perfectly. Sent you a thingiverse-tip to buy yourself a cup of coffee! Thanks again.
@@dlf4574 Thanks.
Is it nessesary to set motors in 45 by each other? if we set it parallel like in balancing robot?
Try it.
Suppose if the unicycle leans to the right side. Then the reaction wheel spins in opposite direction until balance is achieved?
The rotation itself is not necessary. This is an unnecessary side effect. Motor tries to turn the wheel, which has mass, and gets a torque in opposite direction. A heavier wheel is better. But it cannot be very heavy, so need to choose within some limits.
@@ReMRC oh, good to know. Thankyou
How did you make this within 1 month what
1 month? :) No, less, maybe 2 weeks. All hardware is the same as in the self-balancing cube, just printing and a little programming...
@@ReMRC you are awesome man you are inspiring keep it up :D
👍👍👍👍👍👍👍☕☕☕☕👍👍👍