Robotics 2 U1 (Kinematics) S2 (Denavit-Hartenberg) P4 (HTM)

ฝัง
- เผยแพร่เมื่อ 30 ก.ย. 2024
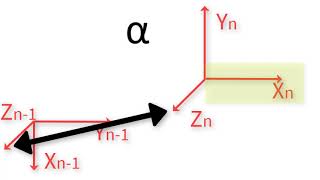
- This short video shows you how to get the homogeneous transformation matrix from the Denavit-Hartenberg Parameter Table.
Robotics 2 is a college-level intermediate robotics class covering kinematics, motion control, machine vision, and artificial intelligence.
For complete curriculum and to get the kit used in this class, go to www.robogrok.com








Your channel has been immensely helpful to me.
Thank you so much for the video
Thank you for the clear explanation.
we didn't make the homogeneous transformation matrix like that ; there is defferent htm or what?
Can you please tell how these matrices are made like what to multiply with row1 row2 etc.
@@zaidshabbir1569 it might help you to go to my website, robogrok.com. I have these videos organized better there, in a kind of "map" of topics. This video is in the Robotics 2 section, then kinematics. If you go there, you can see the videos that come before and after this one, and that might help. You can also go back to the Robotics 1 kinematics section, for more foundational explanations of things related to this, like rotation matrices and the homogeneous transformation matrix (HTM)
maam can you share the link of matrices multiply video
Here's a good one from Khan Academy: www.khanacademy.org/math/precalculus/x9e81a4f98389efdf:matrices/x9e81a4f98389efdf:multiplying-matrices-by-matrices/v/matrix-multiplication-intro
@@asodemann3 thanks, but I'm feeling comfort with your explanation, it is really immensely helpful for me, ergo, if it possible to share a fruitful video explanation by you, please share with me, thanks
hello, what book did you get the matrix from?
very good videos
great video. thank you.
thank you madame you're amazing
❤
Boht tgda
The multiplications honestly take an ungodly amount of time.
Yes, you wouldn't normally do the multiplication by hand. Instead, you would enter each individual matrix into your code, then have your code do the multiplication. For an example of how to do that, go to my website (www.robogrok.com), click on 'Go to Course' for Robotics 1, then go to the section on Homogeneous Transformation Matrix. We enter the matrices into Python and multiply them.