Agile Omnidirectional Mobile Robot for Human Environments

ฝัง
- เผยแพร่เมื่อ 17 ต.ค. 2024
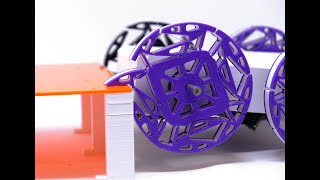
- Agile Omnidirectional Mobile Robot with Gravity Compensated Wheel-Leg Mechanisms for Human Environment
Changeable supporting polygon with a small footprint like humans.
Holonomic omnidirectional mobile robot with wheel-leg mechanisms
4 mecanum wheels with gravity compensated 2-DOF legs
% Submitted to IEEE IROS2021 and RA-L
% Supported by NAVER LABS



![[Gegagedigedagedago] NEW Help Gegagedigedagedago Nugget escape from Nikocado Avocado Challenge](http://i.ytimg.com/vi/hJWnwRC2Fz8/mqdefault.jpg)

![[UNCUT] "บอสณวัฒน์" แฉ! แหล่งซุกเงินแก๊งบอส ขยันผิดที่ไม่กี่ปีก็เข้าคุก l คนดังนั่งเคลียร์ l17ต.ค.67](http://i.ytimg.com/vi/BL56qIfXYZM/mqdefault.jpg)


My favorite robot channel after boston dynamics.
You people are underrated.
Mecanum wheels are very underrated devices. We use them in our high school robotics competition and i am very inspired to see this advanced application.
This is awesome, looks like the spider tank from ghost in the shell
The first original or the reboot?
Incredible design, I can’t wait to see this project come together.
This is what i was looking for for my project i was stuck with the idea a robot platform on squre shape but this is truly i opening
The secret chamber of bleeding edge technology. Love it
First of all this is brilliant.
How many degrees of freedom? and what type of motors have you used?
After testing do you think that Omni wheels are suitable for stairs climbing or not?
12-DOF including wheels. BLDC. Special strategy and structure are essential for Omni-wheels to climb stairs.
Phenomenal control-design and engineering work upon your entire channel. Something like this with active rocker-boogie mechanism would essentially be able to move over pretty much any conceivable terrain, wouldn't it?
This is a robot that fits its definition! Awesome stuff.
Great design...never thought of using parallels :)
Thank you for sharing.
Wow that's some impressive engineering, will say I don't think robots need faces, usually has a negative effect on people unfamiliar to robots
Two years later: We are in the midst of Humanoid robot madness! The current insistence on bi-pedal designs is nuts! A robot that is designed to work in an environment made for humans, but improving on the weak areas of the human body is logical. A base such as this HAS to be step one!
Mecanum wheels are great in a controlled environment, as shown here, but out in the real world more rugged alternatives could be required.
There is a clarity of thinking at IRIM LAB KOREATECH that is always refreshing. Thank you.
Ooo. Very nice! Keep up the nice work on it!
This is one of my favorite robots.👍🙂👍
Awesome! What about climbing stairs?
It looks like it'd be able to climb stairs, though very slowly, with a different program. The step program involves driving to reposition the body above a step, but with stairs it would need to move it's body without driving forward to do so. The only potential issue would be the legs interfering with the steps, though a resign to incorporate arched legs would probably fix this. Alternatively, using a walking gait of standing on opposite corners may work, where front left and back right wheels are planted while the front right and back left wheels are repositioned to step up stairs, this same gait would also be useful for a single step and would be much faster; the fact that each leg can pivot makes this gait much more possible, especially in initial and final steps, as the robot can have three points of contact while one leg is lifted onto or off of the initial or final step. Though, this is ultimately reliant on how heavy and dynamic the full robot is, not just the driven platform, as weight shifting can entirely null this solution; but at the same time, a hexapod or octopod variant of this wouldn't have such severe limitations, or the implementation of a mid-leg 'knee' joint may alleviate some of the unforeseeable balancing issues depending on overall flexibility of the leg and range of wheel positions.
no way. hahahha you are more and more close to my dream. I need to work on it before you make it all.
Would be nice for human environments if mecanum wheels weren't so loud
Looks Great!
True art guys. nice work. use it for good!
The only problem is that the neighbors from the floor below will hate you.
This video reminds me I should do some stretching today. ;)
When are you gonna be mounting the upper half?
Simply amazing.
Could you please tell me how I can access your papers?
This things looking like it would destroy some toes.
Can't wait to see LIMS2 on top of this
Is that thems awesome arms and stuff
А как к вам на работу устроится? У меня мозги кипят от идей.
Очень не плохо.
incredible
Do you can share mechanical drawings?
Супер надо будет заделать самому
Congratulation
Please give details about this robot
good job
Tachikoma!
👍🏆👍
Looks like the batmobile
mecanuum wheel has alot of vibration
imagine seeing these, but fully developed warmachines patroling the streets...
I have better things to use my imagination for! Think positive, not negative.
Что за машини у них стоят?
Omniwheels are so loud...
The saying don't try to re-invent the wheel is definitely bull shit..
Someone has watched way too much anime.
It needs 8 legs, for conquering steps and stairs.
Soon it will be go "code geass".
미쳤다리 테슬라에 당장 가야 하는거 아님?