At 17:24 for aircraft to pitch up, we pull the lever and the elevator degree decreases and takes negative values, upwards to aircraft to pitch up. Yet in this video graphics, the trailing edge of the elevator control surface goes downwards while pitching up. Am I missing something here? Thank you for those profound informations.
Yes, there was an error in the animation that caused the elevator to move in the opposite direction. All views of the aircraft show the elevator with a sign error. Good catch. In the Patreon codes as well as future videos, this has been corrected.
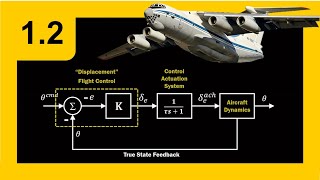
It would usually be one or the other. Consider the benefits and drawbacks. The pitch "displacement" control in (Section 1.2) addresses pitch angle tracking, but as a proportional control only on pitch angle error, it has constant bias error in step command tracking. It also does not allow artificial damping. Additionally, pitch angle may not be available from a modern inertial measurement units, although early gyros did provide pitch angle. This architecture would most likely be found on early aircraft. The pitch rate tracking architecture (Section 1.4) includes artificial damping and an integrator on the pitch rate error. This provides much greater ability to augment the closed loop response of the aircraft. The only output feedback is pitch rate, which is measured by modern IMUs. It is more complex than the single gain displacement controller, but still simple 2-gain control architecture.
I have mixed both. You can make pitch angle an auto trim feature. And pitch rate as a stabilizing feature there fore producing a very stable FBW for unstable craft









Great video, thanks!
Glad you liked it!
Thank you for sharing
Thanks for watching!
At 17:24 for aircraft to pitch up, we pull the lever and the elevator degree decreases and takes negative values, upwards to aircraft to pitch up. Yet in this video graphics, the trailing edge of the elevator control surface goes downwards while pitching up. Am I missing something here? Thank you for those profound informations.
Yes, there was an error in the animation that caused the elevator to move in the opposite direction. All views of the aircraft show the elevator with a sign error. Good catch. In the Patreon codes as well as future videos, this has been corrected.
Does an aircraft have both pitch control system as well as pitch rate control system?
It would usually be one or the other. Consider the benefits and drawbacks.
The pitch "displacement" control in (Section 1.2) addresses pitch angle tracking, but as a proportional control only on pitch angle error, it has constant bias error in step command tracking. It also does not allow artificial damping. Additionally, pitch angle may not be available from a modern inertial measurement units, although early gyros did provide pitch angle. This architecture would most likely be found on early aircraft.
The pitch rate tracking architecture (Section 1.4) includes artificial damping and an integrator on the pitch rate error. This provides much greater ability to augment the closed loop response of the aircraft. The only output feedback is pitch rate, which is measured by modern IMUs. It is more complex than the single gain displacement controller, but still simple 2-gain control architecture.
I have mixed both.
You can make pitch angle an auto trim feature.
And pitch rate as a stabilizing feature there fore producing a very stable FBW for unstable craft
I see, a pitch angle trim control system with a stabilizing pitch rate controller. This makes sense. Thanks for sharing this.