
- 67
- 639 595
Jurnan Schilder
เข้าร่วมเมื่อ 25 ส.ค. 2011
วีดีโอ


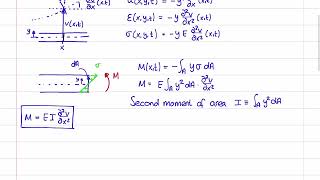
Mechanical Vibrations 65 - Beams 5 - Free Vibrations
มุมมอง 3.5K4 ปีที่แล้ว
Mechanical Vibrations 65 - Beams 5 - Free Vibrations

Mechanical Vibrations 64 - Beams 4 - Orthogonality of Natural Modes
มุมมอง 3.1K4 ปีที่แล้ว
Mechanical Vibrations 64 - Beams 4 - Orthogonality of Natural Modes

Mechanical Vibrations 66 - Beams 6 - Forced Vibrations
มุมมอง 3.8K4 ปีที่แล้ว
Mechanical Vibrations 66 - Beams 6 - Forced Vibrations

Mechanical Vibrations 63 - Beams 4 - Natural Frequencies & Modes 2
มุมมอง 3.7K4 ปีที่แล้ว
Mechanical Vibrations 63 - Beams 4 - Natural Frequencies & Modes 2

Mechanical Vibrations 62 - Beams 3 - Natural Frequencies & Modes 1
มุมมอง 5K4 ปีที่แล้ว
Mechanical Vibrations 62 - Beams 3 - Natural Frequencies & Modes 1

Mechanical Vibrations 61 - Beams 2 - Equilibrium Analysis
มุมมอง 2.9K4 ปีที่แล้ว
Mechanical Vibrations 61 - Beams 2 - Equilibrium Analysis
Mechanical Vibrations 60 - Beams 1 - Equation of Motion
มุมมอง 7K4 ปีที่แล้ว
Mechanical Vibrations 60 - Beams 1 - Equation of Motion

Mechanical Vibrations 59 - Bending Vibrations of Beams
มุมมอง 3.7K4 ปีที่แล้ว
Mechanical Vibrations 59 - Bending Vibrations of Beams
Mechanical Vibrations 58 - Shafts - Equation of Motion
มุมมอง 2.9K4 ปีที่แล้ว
Mechanical Vibrations 58 - Shafts - Equation of Motion
Mechanical Vibrations 57 - Torsion Vibrations of Shafts
มุมมอง 2.3K4 ปีที่แล้ว
Mechanical Vibrations 57 - Torsion Vibrations of Shafts
Mechanical Vibrations 54 - Bars 4 - Orthogonality of Natural Modes
มุมมอง 2.6K4 ปีที่แล้ว
Mechanical Vibrations 54 - Bars 4 - Orthogonality of Natural Modes
Mechanical Vibrations 56 - Bars 6 - Forced Vibrations
มุมมอง 2.6K4 ปีที่แล้ว
Mechanical Vibrations 56 - Bars 6 - Forced Vibrations
Mechanical Vibrations 55 - Bars 5 - Free Vibrations
มุมมอง 2.4K4 ปีที่แล้ว
Mechanical Vibrations 55 - Bars 5 - Free Vibrations
Mechanical Vibrations 51 - Bars 1 - Equation of Motion
มุมมอง 3.7K4 ปีที่แล้ว
Mechanical Vibrations 51 - Bars 1 - Equation of Motion
Mechanical Vibrations 53 - Bars 3 - Natural Frequencies & Modes
มุมมอง 3.3K4 ปีที่แล้ว
Mechanical Vibrations 53 - Bars 3 - Natural Frequencies & Modes
Mechanical Vibrations 52 - Bars 2 - Equilibrium Analysis
มุมมอง 2.7K4 ปีที่แล้ว
Mechanical Vibrations 52 - Bars 2 - Equilibrium Analysis
Mechanical Vibrations 50 - Axial Vibrations of Bars
มุมมอง 2.5K4 ปีที่แล้ว
Mechanical Vibrations 50 - Axial Vibrations of Bars
Mechanical Vibrations 49 - Strings 6 - Forced Vibrations
มุมมอง 2.9K4 ปีที่แล้ว
Mechanical Vibrations 49 - Strings 6 - Forced Vibrations
Mechanical Vibrations 48 - Strings 5 - Free Vibrations (Example)
มุมมอง 3.2K4 ปีที่แล้ว
Mechanical Vibrations 48 - Strings 5 - Free Vibrations (Example)
Mechanical Vibrations 45 - Strings 2 - Natural Frequencies & Modes
มุมมอง 4.4K4 ปีที่แล้ว
Mechanical Vibrations 45 - Strings 2 - Natural Frequencies & Modes
Mechanical Vibrations 46 - Strings 3 - Orthogonality of Natural Modes
มุมมอง 3.5K4 ปีที่แล้ว
Mechanical Vibrations 46 - Strings 3 - Orthogonality of Natural Modes
Mechanical Vibrations 47 - Strings 4 - Free Vibrations
มุมมอง 3.1K4 ปีที่แล้ว
Mechanical Vibrations 47 - Strings 4 - Free Vibrations
Mechanical Vibrations 44 - Strings 1 - Equation of Motion
มุมมอง 4.8K4 ปีที่แล้ว
Mechanical Vibrations 44 - Strings 1 - Equation of Motion
Mechanical Vibrations 43 - Introduction to Vibrations of Continuous Systems
มุมมอง 3.9K4 ปีที่แล้ว
Mechanical Vibrations 43 - Introduction to Vibrations of Continuous Systems
Mechanical Vibrations 39 - Modal Analysis 1 - Orthogonality of Natural Modes
มุมมอง 14K4 ปีที่แล้ว
Mechanical Vibrations 39 - Modal Analysis 1 - Orthogonality of Natural Modes
Mechanical Vibrations 41 - Modal Analysis 3 - Forced Vibrations
มุมมอง 5K4 ปีที่แล้ว
Mechanical Vibrations 41 - Modal Analysis 3 - Forced Vibrations
Mechanical Vibrations 40 - Modal Analysis 2 - Free Vibrations
มุมมอง 7K4 ปีที่แล้ว
Mechanical Vibrations 40 - Modal Analysis 2 - Free Vibrations
Mechanical Vibrations 42 - Modal Analysis 4 - Damped MDOF Systems
มุมมอง 8K4 ปีที่แล้ว
Mechanical Vibrations 42 - Modal Analysis 4 - Damped MDOF Systems
Mechanical Vibrations 38 - Modal Analysis
มุมมอง 5K4 ปีที่แล้ว
Mechanical Vibrations 38 - Modal Analysis
are you sure about the general Solution? Does that mean the system is unstable if c2 is not zero....I looked into other resources and I didn't see the same solution
Hi. Is the structure of your lessons for mechanical vibrations based on a specific textbook? If yes could you please name the textbook.
WOAH, this was your FIRST online course??? I absolutely loved how you taught it! I am sad you don't have lectures for the rest of my subjects! Or just more vibrations like with Fourier Series and such
❤❤❤
I feel like i've seen this guy in the "Have you seen this guy in your Sleep" posters
Is f0(t+1) a function or a variable*brackets?
What a beautiful writing
Thank you for the series. It was very helpful for studying dynamics 2 :)
Tks for sharing this course. :)
I hope to get 11/10 in 2 months, amazing videos!
Where does Ic=1/2mR^2 came from for homogeneous mass for the disc?
I very like these introductory lectures before the detailed lectures of each different concepts. Great way to motivate the students, and make the concept more intuitive during learning process. Thank you.
Thank you so much
hello is this beam subjected to a force or not if yes give me the value of this force
Great video! Thank you for explanation! Anyway, I didn't understand why the fourth deivative of Vi is canceled. Shouldn't it be replace with a terms that in some steps gives you the modal mass? Or maybe I just missed some assumptions. Sorry I'm trying to figure out the meeaning of modal mass on the beam
thanks, very clearly explained:)
Valuable videos🎉🎉
Great... Very helpful ❤❤
Thank you for sharing your knowledge on this subject! The explanations are clear and concise and very cleanly illustrated on the paper.
This is the best vedio I have seen on TH-cam. Thank you for your demonstration and thank you for your time👏
can you explain more the chain rule of calculus in this case please?
Natural frequency isnt it 1 over time? , 1/t=f
Can I know the program that u use to write like this plz
Which book do you follow sir
Which book do you follow
Hi Juran, Heel duidelijk uitgelegd. Top
Tanks a lot sir for making this course public. Is there any possible way to make the lecture notes available too? It can be so helpful to review the contents...
If the masses and sping constants are same in 1st problem, how the expression of kinetic and potential energy will vary? Please answer
If m1 = m2 = m and k1 = k2 = k. Assuming the system has 2 degrees of freedom x1 and x2. The expression of the kinetic and potential energy in the 1st problem would look similar without the subscripts on m and k.
Hi! Prof. Schilder, I am glad to learn about your mechanic vibration lesson, these lesson hello me a lot. to reduce the vibration amplitude of a centrifugal fan whose motor support bracket like a spider, I optimize the structure of the spider, which is like a cantilever system. I change the leg of spider structure from one beam to a trusswork, and the vibration amplitude was reduced. and I can't understand the relationship between the stability of structure and vibration amplitude. could you share me some know-how about this issue? may you have a nice day.
thank you for all the hard work you have put in.
Do you have MATLAB code to solve this?
Life saver
Thank you for the videos. They were very enjoyable and clear.
at 9:35 , why do you say that B^4 = (n^4pi^2/L^4) _times_ rhoA ..., should it not be *equal* to rhoA ...?
You are absolutely right!
So, if I understand correctly, when integrating the delta function from 0 to L, we can always say it is equal to 1? Is that like saying you integrate from 0 to (L- to L+) as it is such a small piece of L? I am confused, as when evaluating the integral you get delta(L - L) - delta (0 - L) = 0 - delta (-L) , where -delta(-L) = infinite.
and if that is the case, then I don't quite understand what's the use of this delta function..
It causes the sin integral to stay a sin, and I do not get why
If i is j, why still write down Vj Vi, and not just Vi^2 or something like that?
What a ride! This whole course had its highs and its twits and turns, with me not getting it, but in the end the whole plot fell together wonderfully. Jokes aside, many thanks Professor Schilder for these lectures, a great series!
(Possibly stupid question) Shouldn't there be some sort of coefficients in from of each term U(x)\eta(t) so that the sum converges? I'm modeling some vibrations in a beam in MATLAB, and, without these coefficients in front, the first 10 terms appear not to capture ~99% of the variability, which, I would think the first 4 or 5 terms would ordinarily do so. TIA
So for X1, do you multiply the function by (1/m) / (1/m^2)?
No, he multiplied the numerator by 1/m^2 as well as the denominator. It took me a while to figure it out, but he put one of the m's from the numerator underneath F. You could think of it as the numerator being = F*(2k-mw^2) so dividing that by m^2 is the same thing as (F/m)*((2k-mw^2)/m). It's like how 2 * (1/2 )= (2/2). He just moved the (F/m) to the side.
Wonderful video series, sir! Thank you so much for your lovely exposition.
Do we just assume its an exponential? So choose e^(st) every time? or because it would be logical is the bullet was to slow down exponentially?
So, in fact I show in this video that for a 1st order linear ODE with constant coefficients we van DERIVE that the solution is an e-power. This leads us to TRY and e-power for any other linear ODE with constant coefficients as well. If we do try this, we see that this will always work indeed.
1) It looks like you are using the fact that the "differential equation operator" is self-adjoint (Sturm-Liouville theory), so eigenvectors corresponding to distinct eigenvalues are orthogonal (really a consequence of The Spectral Theorem) th-cam.com/video/12d15vI52b8/w-d-xo.html 2) "The Gram-Schmidt process is A Good Thing" (TM).
You are absolutely right Jeff and thanks for sharing the interesting link. Since this lecture series is intended for mechanical engineering students, I try to keep the mathematical background to a minimum. At our university, a math course on Theory of PDEs is offered only in the master phase and this is mentioned there.
[OT] How, if at all, can all of this be simplified/streamlined by Laplace/Fourier transforms?
Thanks for all your nice comments Jeff. The equations of motion of a vibrating string, bar and shaft are in fact all examples of the Wave Equation. The general solution can be written as a Fourier series in space. So in this case, trying a Fourier series will not just be a good approximation, but actually result in the exact solution as presented here. For other continuous problems though, like a vibrating beam, the equation of motion is fourth order in space. Using a Fourier series as general solution will not be able to satisfy all boundary conditions and therefore only approximate the solution. The general solution contains a sine/cosine combo and a sinh/cosh combo. You will see this in the videos about vibrating bars. I hope that once you have arrived there, this will become clear. If not, please ask me again at that time.
@@JurnanSchilder Very good; that absolutely and thoroughly answers the question - thank you.
1) Super-great video series! Thank you so much. 2) I guess I'm used to seeing k as the symbol for the wave number, not \beta, but, if this is common usage, I'll get used to it.
Indeed k is also used a lot. Since we use k also for a spring's stiffness, we sometimes use \beta instead. Feel free to change it to k if you prefer it though!
@@JurnanSchilder Right, spring stiffness; I just wasn't thinking - keep your notation.
watching this 3 years after you posted them and I have to say they are the best I've seen. please consider doing videos on other subjects. Thanks a lot!
thanks a lot! great!
thanks that is very helpful, really appriciate it
thanks a lot
Great Lectuve, thank you, but why do you take the second Partial derivative of v(x,t) with respect to t, for the acceleration term ? I would have take the total second derivative of v(x,t) with respect to t, for the acceleration, and develop this term using the chain rule. Would i find the same result if i do this ? I do not know if my question/probleme is clear.
I think that x is not a function of time as this is just the point where you are watching the string, I would thus say that a total derivative or partial derivative gives the same answer.
I didn't get how the solution part works at 10:26 How did the quadratic eqn with s^2 + ... gets multiplied to the exponent and equated?
It is an homogeneous second ODE. Using x(t)= exp(st) then differentiate twice gives x(t)' = s*exp(st) and x(t)"= s^2*exp(st). Substituting this in x" + d/m*x' + k/m*x=0 gives --> s^2*exp(st) + d/m*(s*exp(st)) + k/m*exp(st) = 0 . Now we take exp(st) common as its a common factor in all terms. This results in (s^2 + d/m*s + k/m)*exp(st). The natural frequency is given as wn=sqrt(k/m) --> wn^2=k/m. Damping factor is given as J=d/2mwn. rewrite this in d/m gives d/m=2Jwn. Substituting wn^2 and d/m in (s^2 + d/m*s + k/m)*exp(st) gives --> (s^2 +2JwnS + wn^2)exp(st)=0. As exp(st) will never reach zero, the terms in the brackets must equal 0 in order for the equation to be true. I hope my explanations helps and makes sense:)
@@robbybos1999 wow, got it now! thanks so much buddy! That was a very clear explanation!