
- 30
- 32 127
Intelligent Robot Motion Lab
United States
เข้าร่วมเมื่อ 6 มิ.ย. 2018
Videos from the Intelligent Robot Motion Lab at Princeton University
Explore until Confident: Efficient Exploration for Embodied Question Answering
Website: explore-eqa.github.io/
Authors: Allen Z. Ren, Jaden Clark, Anushri Dixit, Masha Itkina, Anirudha Majumdar, Dorsa Sadigh
Abstract: We consider the problem of Embodied Question Answering (EQA), which refers to settings where an embodied agent such as a robot needs to actively explore an environment to gather information until it is confident about the answer to a question. In this work, we leverage the strong semantic reasoning capabilities of large vision-language models (VLMs) to efficiently explore and answer such questions. However, there are two main challenges when using VLMs in EQA: they do not have an internal memory for mapping the scene to be able to plan how to explore over time, and their confidence can be miscalibrated and can cause the robot to prematurely stop exploration or over-explore. We propose a method that first builds a semantic map of the scene based on depth information and via visual prompting of a VLM - leveraging its vast knowledge of relevant regions of the scene for exploration. Next, we use conformal prediction to calibrate the VLM's question answering confidence, allowing the robot to know when to stop exploration - leading to a more calibrated and efficient exploration strategy. To test our framework in simulation, we also contribute a new EQA dataset with diverse, realistic human-robot scenarios and scenes built upon the Habitat-Matterport 3D Research Dataset (HM3D). Both simulated and real robot experiments show our proposed approach improves the performance and efficiency over baselines that do no leverage VLM for exploration or do not calibrate its confidence.
Authors: Allen Z. Ren, Jaden Clark, Anushri Dixit, Masha Itkina, Anirudha Majumdar, Dorsa Sadigh
Abstract: We consider the problem of Embodied Question Answering (EQA), which refers to settings where an embodied agent such as a robot needs to actively explore an environment to gather information until it is confident about the answer to a question. In this work, we leverage the strong semantic reasoning capabilities of large vision-language models (VLMs) to efficiently explore and answer such questions. However, there are two main challenges when using VLMs in EQA: they do not have an internal memory for mapping the scene to be able to plan how to explore over time, and their confidence can be miscalibrated and can cause the robot to prematurely stop exploration or over-explore. We propose a method that first builds a semantic map of the scene based on depth information and via visual prompting of a VLM - leveraging its vast knowledge of relevant regions of the scene for exploration. Next, we use conformal prediction to calibrate the VLM's question answering confidence, allowing the robot to know when to stop exploration - leading to a more calibrated and efficient exploration strategy. To test our framework in simulation, we also contribute a new EQA dataset with diverse, realistic human-robot scenarios and scenes built upon the Habitat-Matterport 3D Research Dataset (HM3D). Both simulated and real robot experiments show our proposed approach improves the performance and efficiency over baselines that do no leverage VLM for exploration or do not calibrate its confidence.
มุมมอง: 357
วีดีโอ


Perceive with Confidence: Statistical Safety Assurance for Navigation with Learning-Based Perception
มุมมอง 6556 หลายเดือนก่อน
Rapid advances in perception have enabled large pre-trained models to be used out of the box for processing high-dimensional, noisy, and partial observations of the world into rich geometric representations (e.g., occupancy predictions). However, safe integration of these models onto robots remains challenging due to a lack of reliable performance in unfamiliar environments. In this work, we pr...
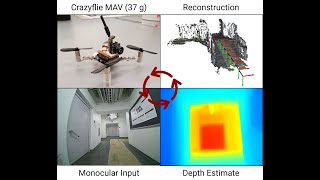
MonoNav: MAV Navigation via Monocular Depth Estimation and Reconstruction
มุมมอง 93310 หลายเดือนก่อน
MonoNav is a monocular navigation stack that enables monocular robots to navigate unexplored environments. MonoNav leverages pre-trained depth-estimation networks (ZoeDepth) to convert RGB images into depth estimates, then fuses them into a 3D reconstruction using Open3D. MonoNav then selects from motion primitives to navigate collision-free to a goal position. We compare MonoNav to NoMaD, a st...

Princeton Robotics - Lerrel Pinto - Three Lessons for Building General-Purpose Robots
มุมมอง 1K10 หลายเดือนก่อน
Princeton University - Oct 6, 2023 Speaker: Lerrel Pinto (NYU) Talk title: Three Lessons for Building General-Purpose Robots For more information about the seminar, see robo.princeton.edu/seminar

Princeton Robotics - Russ Tedrake - Dexterous Manipulation with Diffusion Policies
มุมมอง 11K10 หลายเดือนก่อน
Princeton University - Nov 3, 2023 Speaker: Russ Tedrake (MIT) Talk title: Dexterous Manipulation with Diffusion Policies For more information about the seminar, see robo.princeton.edu/seminar

(Preview) Go with the Flow: Can a 30 g Crazyflie be used as a particle to track wind gusts?
มุมมอง 13511 หลายเดือนก่อน
Researchers are interested in tracking particles in the atmosphere to study turbulence. Snow and bubbles have been used - but these systems require expensive infrastructure and have small measurement volumes. Can micro aerial vehicles, such as the 30 g Crazyflie, be used as particles? To explore this, we track the Crazyflie in a series of gusts, as compared to tiny, helium-filled soap bubbles. ...
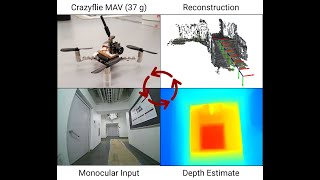
(Preview) MonoNav: MAV Navigation via Monocular Depth Estimation and Reconstruction
มุมมอง 2.7K11 หลายเดือนก่อน
This is a research preview of the MonoNav system, which enables micro aerial vehicles, or MAVs, to fly in previously unseen environments. MAVs are often constrained to use lightweight sensors - for perception, this means a tiny monocular camera. This renders many conventional planning techniques unusable. However, with access to offboard computation, MAVs can take advantage of recent advances i...

Princeton MAE Seminar: Robots that know when they don't know
มุมมอง 658ปีที่แล้ว
Princeton MAE Seminar: Anirudha Majumdar Deep learning has enabled rapid advances in perception, planning, and natural language understanding for robots. However, despite these advances, current robotic systems lack formal guarantees on safety and performance when required to generalize to novel scenarios. Perception systems for autonomous vehicles can fail to identify unfamiliar objects, learn...

Improving Drone Performance in Wind with Novel, Fast, Sensors (PRD 2023)
มุมมอง 3.8Kปีที่แล้ว
This video, "Improving Drone Performance in Wind with Novel, Fast, Sensors" received an Outstanding Presentation Award ($1,500) at the 2023 Princeton Research Day. More information on the event can be found here: researchday.princeton.edu. More information about the FlowDrone project can be found here: natesimon.github.io. Nate Simon, Graduate Student Mechanical and Aerospace Engineering Advise...
ISDFS Talk: Robots that ask for help: Conformal Prediction for LLM Planners
มุมมอง 612ปีที่แล้ว
Talk at the International Seminar on Distribution-Free Statistics Title: Robots That Ask For Help: Conformal Prediction for LLM Planners Abstract: Large language models (LLMs) exhibit a wide range of promising capabilities from step-by-step planning to commonsense reasoning that may provide utility for robots, but remain prone to confidently hallucinated predictions. In this talk, I will presen...
Robots That Ask For Help: Uncertainty Alignment for Large Language Model Planners
มุมมอง 2.3Kปีที่แล้ว
Please check out our website: robot-help.github.io Paper: arxiv.org/abs/2307.01928 Authors: Allen Z. Ren, Anushri Dixit, Alexandra Bodrova, Sumeet Singh, Stephen Tu, Noah Brown, Peng Xu, Leila Takayama, Fei Xia, Jake Varley, Zhenjia Xu, Dorsa Sadigh, Andy Zeng, Anirudha Majumdar Abstract: Large language models (LLMs) exhibit a wide range of promising capabilities from step-by-step planning to c...
AdaptSim: Task-Driven Simulation Adaptation for Sim-to-Real Transfer
มุมมอง 354ปีที่แล้ว
Arxiv link: arxiv.org/abs/2302.04903 Author: Allen Z. Ren, Hongkai Dai, Benjamin Burchfiel, Anirudha Majumdar Under review. Abstract: Simulation parameter settings such as contact models and object geometry approximations are critical to training robust robotic policies capable of transferring from simulation to real-world deployment. Previous approaches typically handcraft distributions over s...
Leveraging Language for Accelerated Learning of Tool Manipulation
มุมมอง 371ปีที่แล้ว
Visualization of the four manipulation tasks considered in the paper: pushing, lifting, sweeping, and hammering. Authors: Allen Z. Ren, Bharat Govil, Tsung-Yen Yang, Karthik Narasimhan, Anirudha Majumdar
Provably Safe Learning-Based Robot Control (Alec Farid, PhD Defense)
มุมมอง 1.3Kปีที่แล้ว
Alec Farid PhD Defense: Jan 25, 2023 Provably Safe Learning-Based Robot Control via Anomaly Detection and Generalization Theory How can we ensure the safety of a control policy for a robot that operates using high-dimensional sensor observations such as vision (e.g., an autonomous drone or a home robot)? Machine learning techniques provide an appealing option because of their ability to deal wi...
Switching Attention in Time-Varying Environments via Bayesian Inference of Abstractions
มุมมอง 198ปีที่แล้ว
Arxiv link: arxiv.org/pdf/2211.05865.pdf Authors: Meghan Booker and Anirudha Majumdar Abstract: Motivated by the goal of endowing robots with a means for focusing attention in order to operate reliably in complex, uncertain, and time-varying environments, we consider how can a robot (i) determine which portions of its environment to pay attention to at any given point in time, (ii) infer change...
FlowDrone: Wind Estimation and Gust Rejection on UAVs Using Fast-Response Hot-Wire Flow Sensors
มุมมอง 658ปีที่แล้ว
FlowDrone: Wind Estimation and Gust Rejection on UAVs Using Fast-Response Hot-Wire Flow Sensors
Failure Prediction with Statistical Guarantees for Vision-Based Robot Control
มุมมอง 2482 ปีที่แล้ว
Failure Prediction with Statistical Guarantees for Vision-Based Robot Control
Final project for Introduction to Robotics at Princeton: Vision-based Navigation with Drone
มุมมอง 5202 ปีที่แล้ว
Final project for Introduction to Robotics at Princeton: Vision-based Navigation with Drone
Task-Driven Detection of Distribution Shifts with Statistical Guarantees for Robot Learning
มุมมอง 1952 ปีที่แล้ว
Task-Driven Detection of Distribution Shifts with Statistical Guarantees for Robot Learning
Safety and Generalization Guarantees for Learning-Based Control of Robots
มุมมอง 4692 ปีที่แล้ว
Safety and Generalization Guarantees for Learning-Based Control of Robots
Distributionally Robust Policy Learning via Adversarial Environment Generation
มุมมอง 2443 ปีที่แล้ว
Distributionally Robust Policy Learning via Adversarial Environment Generation
Learning to Actively Reduce Memory Requirements for Robot Control Tasks
มุมมอง 2254 ปีที่แล้ว
Learning to Actively Reduce Memory Requirements for Robot Control Tasks
Generalization Guarantees for Multi-Modal Imitation Learning
มุมมอง 8734 ปีที่แล้ว
Generalization Guarantees for Multi-Modal Imitation Learning
Invariant Policy Optimization: Towards Stronger Generalization in Reinforcement Learning
มุมมอง 2224 ปีที่แล้ว
Invariant Policy Optimization: Towards Stronger Generalization in Reinforcement Learning
Probably Approximately Correct Vision-Based Planning using Motion Primitives
มุมมอง 3504 ปีที่แล้ว
Probably Approximately Correct Vision-Based Planning using Motion Primitives
Task-Driven Policy Gradient Vision-Based Ball-Catching
มุมมอง 1954 ปีที่แล้ว
Task-Driven Policy Gradient Vision-Based Ball-Catching
PAC-Bayes control for obstacle avoidance with Parrot SWING
มุมมอง 7154 ปีที่แล้ว
PAC-Bayes control for obstacle avoidance with Parrot SWING
PAC-Bayes control for obstacle avoidance
มุมมอง 1965 ปีที่แล้ว
PAC-Bayes control for obstacle avoidance
Gap-Seeking Obstacle Avoidance Control with a Quadruped Robot
มุมมอง 5786 ปีที่แล้ว
Gap-Seeking Obstacle Avoidance Control with a Quadruped Robot