Current Approaches and Future Directions for Point Cloud Object Detection in Intelligent Agents

ฝัง
- เผยแพร่เมื่อ 4 ก.ย. 2024
- Talk for my Penn WPEII - Current Approaches and Future Directions for Point Cloud Object Detection in Intelligent Agents
Written document associated with this talk can be found here: vedder.io/misc/...


![[UNCUT] "เสรีพิศุทธ์" แฉยับ! งัดหลักฐานใหม่ชั้น 14 ได้นอนคุกสมใจแน่!! I คนดังนั่งเคลียร์ I 2 ก.ย.67](http://i.ytimg.com/vi/O1SSg4p9Izs/mqdefault.jpg)


![ตีสิบเดย์ [FULL] | ตัวตึง! ปากกล้า! ท้ารบ! "ทนายไพศาล เรืองฤทธิ์"](http://i.ytimg.com/vi/pU3dXTsaBVc/mqdefault.jpg)

A whole lot of good content. You have made things easy to understand! Wish you all the best! And thank you for the video!
Very nice and clear for a complex subject!
Really great for learning and understanding .Thanks
This is an awesome presentation not only showing all the different methods of point cloud detection but also the inspiration behind each one. A similar breakdown of methods doing 3D object detection on monocular images might also be an awesome idea, as a lot of the networks use similar "pseudo image" and voxel based techniques.
I'm glad you liked the presentation! I put this together for my WPEII, Penn's Masters Thesis-esque presentation requirement for PhD students, and this review directly inspired a paper I just submitted to ICRA (I finished its overview video an hour ago th-cam.com/video/zuLboHg3GLA/w-d-xo.html). For my thesis though, I'm probably going to stop doing strictly vision work and move towards blending it with continual/lifelong learning, which is the thrust of my lab's research, as I believe it's important for getting robots to work robustly in practice in real environments.
@@kylevedder4259 Agreed, it will help bridge the existing gap in production systems, all the best!
Great presentation! Thanks for sharing.
Excellent talk, thanks for posting
u are a future great thinker of the times
but currently
Nice presentation
Excellent presentation, I got a lot of good information out of it.
thaank you! :)
Kyle great work! It seems that you have done a lot of research in this area. Can you point me in the right direction to identify existing point cloud processing libs that might allow me to programmatically determine the dimensions of a picture frame hanging on a wall? I have the images the point cloud was created from if that helps. Happy to support you if you can help me!
I don't know any off-the-shelf methods that do this exact thing (they may exist), but if you have an actual point cloud, you just need to identify the four corners of the painting (using something like en.wikipedia.org/wiki/Corner_detection) and then you just have to measure the distance between the corners in physical space. If you're looking at the wall with the painting at an oblique angle, in order to get a good view of the four corners you may want to first reproject the wall to be perpendicular to the camera, which you can do by first extracting the wall with a RANSAC based approach, e.g. Fast Sampling Filtering (www.cs.cmu.edu/~mmv/papers/11rssw-BiswasVeloso2.pdf)
Do u have some informations about algorithms or works on semantic classification for lidar 3d points ( taking into account the ground isn't flat (rural), fog and dirt particules) thank you
fire fam
Nice tutorial by the way. I just recently jumped in this area of research.Could you please let me know a specific research direction where it has easy implementation in matlab? and that is offcourse a little gap uptil no body workedon it yet.thanks
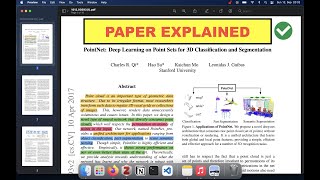
can you please demonstrate and make a separate video, how to prepare own data set to train the pointnet model for the classification task...
Nvidia meets LSD!