Arduino Tutorial 39: Using a Joystick to Control DC Motor Speed and Direction

ฝัง
- เผยแพร่เมื่อ 16 มิ.ย. 2024
- You guys can help me out over at Patreon, and that will help me keep my gear updated, and help me keep this quality content coming:
/ paulmcwhorter
You guys can help me out over at Patreon, and that will help me keep my gear updated, and help me keep this quality content coming:
/ paulmcwhorter
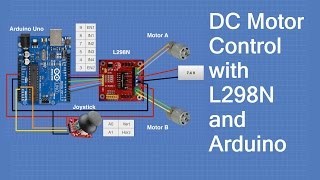
In this video we show how to control a DC motor using a joystick. The example shows you can control both speed and direction. We use the L293d motor controller and a small DC motor.
You can get the kit I am using for this series at the following link:
amzn.to/2I7N4Ek
Follow these lessons for FREE on our WEB site:
toptechboy.com/arduino-tutori...
[Disclosure of Material Connection: I am a participant in the Amazon Services LLC Associates Program, an affiliate advertising program designed to provide a means for sites to earn advertising fees by advertising and linking to amazon.com. This means if you visit the link and purchase the item, I will receive an affiliate commission. Regardless, I only recommend products or services I use personally and believe will add value to my readers.]
#Arduino - วิทยาศาสตร์และเทคโนโลยี




![[TH] VCT Pacific Stage 2 - Week 1 Day 1 // DRX vs ZETA | BLD vs TS](http://i.ytimg.com/vi/AWaOqaxN6Y0/mqdefault.jpg)



i dont know why i find it so amusing when he says "BOOOM". Good video!
And giddy up! Lol
"I want everyone to hold your breath, BOOOM!"
Geeks version of when a good chef says *Bamm!*
I'm so grateful to you for making these videos. You're one of the few gems on TH-cam who goes over the science behind different components without directly jumping into writing code or building the circuit. Thank you for making these videos.
"BOOM!! " I did it the same way you did and your way of teaching is wonderful.
I'm so grateful that I made this project myself. All Thanks to You. You are such a great Teacher.
Nobody on the internet teaches like u.
I did it on my own, because I watched and worked every lesson until this one, thank you so much Paul.
I was able to do it by myself. Followed your examples from previous lessons. Did the math. Used "if" statements. It worked. Fun as always.
I did this one on my own. I figured out the math but was having trouble with it working on the circuit. I finally remembered to use float for my speed value and it worked perfectly. I even added a servo on the other axis for extra credit. I am excited about what I am learning and grateful for the effort you have put into these tutorials. Very much appreciated.
I was discussing this homework with my wife in the car (I'm sure she was thrilled) and just talking through how I thought the graph would have to look. I admit that I wasn't able to do the whole thing on my own, but was super excited when Paul drew the graph exactly how I had described what I thought it would look like to my wife. Three weeks ago I wouldn't have had a clue what any of this meant...thanks Paul!
Watched the whole thing but did it on my own before watching the video. I had a bit of variability on the home position so I needed a range for the zero speeds. I always seem to over complicate things and then I watch you and you make it so much simpler. Thanks again.
I was able to do this project on my own! My code was almost exactly the same, except that I forgot to include the equals sign in one of the conditional statements. Adding that equal sign makes the motor run more smoothly. I'm proud that I was able to figure it out! Thanks alot Paul!
Thanks to the great lessons, I nailed it!! Ready for tutorial 40!!👍
This was the first video of yours I watched. I already had an Elegoo Uno kit and had my L293D chip wired on to my prototyping board and wanted to figure out how to control a motor with the analog joystick. Just watched this video and followed along, my neutral position was 517 but using the code and formula was able to get mine up and running in no time at all! Thanks for this video! Subscribed!
Dear sir.
Thank you VERY much for this content and all the hard work you’re putting into this channel. You are indeed amazing. Your way of teaching is something that should be implemented in schools.
You remind me of my high school physics teacher, Mr Norton. Edward Norton if I remember correctly. This was about 20 years ago and I still remember his hands-on method, he had US doing stuff and analyzing things, rather than just explaining it and hoping something settles in our teenage brains.
Thank you and prosperity unto you and yours.
May your coffee always be strong and your mug full.
Thanks Paul, Another Great Lesson! I really love your lessons .....please keep making such awesome projects!!!
Thanks Paul, Another Great Lesson! I used a similar method to control 2 DC motors with one joystick
Thanks Paul, I appreciate your lessons very much. very informative. Always watch it to the end.
Hi Paul, I was able to complete the homework on my own. The only difference is I accounted for the value needed to start my motor, so my Y values on my graph went from 140 to 255. That is for these lessons they are great.
I have had my arduino for years and have used it for many projects. When I purchased it I also purchased a box of ribbon cables. Up until yesterday, I never realized that they were put out by elegoo. Very nice set of cables, they have served me well!!
I struggled with this one and got my slope/point slope equations wrong at first. Then I realized one slope was negative and the other was positive. idle (zero motor speed) joystick value for me was 505 so i used two different slopes . It was straight forward after that. Thank you Paul for this practical usage of mathematics.
Done, took a little time to have the logic figured out but result was perfect and using the slope formula. Txs Paul.
I did my homeowrk perfect! And also used the SW of the joystic to open or close a LED, you are an awesome teacher!
Wow. Another great vid. I am going to try to do your tutorials from the start. Your quality is worth a patreon its better the other online learning sites.Thank you
As always another great lesson. I did the maths but used three if statements so that there was a 'dead zone' in the middle. (On my joy stick from 500 to 510 where the motor had mSpeed of 0). As the motor does not turn less than mSpeed of 90, the mSpeed went from 90 to 255 in both directions to give a larger range on the joystick
I got this to work, incorporated the emergency tilt switch as per the previous lesson, and used the joystick button as a motor 'boost' to help get it started. Another neat little project.
Thanks Paul. DId this one on my own. Had problems with obtaining finer precision of the motor speed with joystick movement. Fixed it after some troubleshooting.
You are a wonderful teacher makes hi-tech things so lucid
Another great project. You have fun project ideas. Makes this feel like play instead of work. I really like using the joystick.
Hi, Paul, I was able to do this on my own, but it took me a long time to properly work through the math. I had to output my speed values to the serial monitor to see that my equations needed adjustment, and then went back and forth until I got it right. I just wasn't being precise enough when gradually plugging the numbers in and doing the equations one by one with actual point values in order to get the final equations right. I also have a joystick whose centerpoint Y is at 504, so I had to be using 519 in the equations to make everything work right. I'm actually glad that was the case because it made me learn better about plugging in the right numbers in the right places. ... but I got it done on my own and then watched lesson 39. Enough for tonight, I think! Thanks, as always.
I just got an arduino and you have been so helpful, thank you for making this learning experience as easy and as informal as possible. thank you!
Great to hear!
I managed it Paul. Many thanks. It's getting more interesting as I come to terms with the code, which id the great strength of the tutorials.
I was able to complete the homework very similar to your version. Math is your friend. Like you said, as soon as I drew the graph it became very simple. I printed the speed and joystick position and it was very smooth. Thanks for videos.
This lesson was really interesting and informative, thank you.
i really enjoyed the math of the 2 slopes as it showed how far i have come, as i really struggled with the slope math in previous lessons, but followed it this time much more competently.
many thanks from the UK.
You're very welcome!
Hi Paul, I was able to do this on my own. The difference is that my xValue in neutral position is 532. So the 2 slope equations look quite different. But it works pretty well. I got lot of fun.
GIDDY-UP ! it worked a treat ! (all on my lonesome). I made life more complicated, as I used the start point of the motor offset to 75. Also, for some reason, my centered stick was spewing out random variations around 512. So I also did a 'dead-zone' IF band-width in the middle that kept the motor shut down when stick released, stopping the motor from 'wining'. Your way of starting from '0' instead of 75 seems to do this, when I later tried your better method. I also shared the ground & 5v off the breadboard for the J-stick, thinking that was a 'must'. Great Video, Thank you Paul .... uk
I got most of it on my own but needed your math explation to bring it all together. Excellent lesson and presentation . I really see where my algebra is lacking and will have to do a refresher to comprehend all your equation formulas . It's becoming my biggest stumbling block ... Thanks for helping me keep the cob webs out of this aging brain !!
Brilliant vid - thank you so much. It worked first time!
Btw - thank you for all the work you have done on the Fusion 360 tutorials - I couldn't manage without them.
I did the project on my own. The difference was I did it using x as the independent variable, not Y, but the equations were virtually the same. Good lesson and its applications should be many. Thanks for another terrific video.
Always awesome Paul, learning a lot with this arduino tutorial!
Thank you for including the graph and maths. :) This will be a great course.
I got the homework done! The tilt sensor was a lot harder to program in this then the last one. Cant believe in just a short time I was able to accomplish it. thanks for your most excellent teachings .
I didn't do this lesson beforehand -- I had to follow along, but everything made perfect sense to me!
This project was great. Did not get the homework - stumbled on the two slopes. Understood it in the end! Great video, of course.
Great lesson. I had problems doing the maths so I made it work with the build in function. Even with your explanations of this lesson it took me a while to understand it. I am probably a bit older than you are but I enjoy every lesson you post. Now lets do the homework and looking forward to the next lesson.
Hey Paul, I was able to do this on my own thanks to your incredible videos and teaching skills. Doing it on my own was very rewarding and the only thing I did differently to you was use a quadratic equation for mSpeed where 511.5 was the x value of the turning point (halfway between 0 and 1023). I also incorporated the use of the switch on the joystick, where if the switch is pressed (swVal=1) the motor stops running no matter what the jVal is. Thank you so much for your videos Paul!
How can we do that? I def wish Paul would have gone over quadratic equations as this is an amazing example.
I did the homework and after 39 Tutorials, coding it was not hard at all. Thank you Paul, for all your hard work making the Tutorials. Only 29 more Tutorials to go..................
Wonderful way of teaching and charing once again, very grateful!
Did it on my own, did the exact same way as you did sir.
But i find it more natural to turn the motor on before setting the direction although virtually it doesn't make any difference as the arduino reads the lines of code very very very fast.
Thank you for this lesson Sir Paul!
feels great to be learning in this lock down
Did it on my own but the same way as you.
Thanks so much for your insightful lessons
Thanks Paul, got it up and running without too much trouble, must be down to my great teacher. Only differences were the variable names.
Good Lesson. I had slightly different logic ,but, fundamentally the same. Past lesson flow makes it simple. Thank you !
It took me some time to understand that I couldn't plug the joystick into the rail because the voltage drops when the motor switches on. But when I realised that (and redid my equations :-)) everything worked! Another great lesson, thank you!
I was able to do the exercise to the end. Thank you so much for the videos, they are fantastic.
Great job!
Things got a bit cattywampus at first but after making the graph and finding the two equations things started working better until finally it worked right. Math works out again!! Thanks Paul
Here is a bit of an advice for anyone doing this in the future. In the motor which comes with the kit, there is a metal pin inside (which is called a shaft I believe), that goes through the whole motor. On one side of said pin we put the fan blade (aka the propeller thingy), but the other side is sticking out a bit from the rare (bottom) side of the motor. Since this is not an extremely strong motor (you can easily stop it with your finger without having to be afraid to get hurt), if the bottom portion of the pin is touching any surface, it may slow down or even prevent the motor from spinning the fan blade (depending on how you fixed the motor on your workbench or desk). I couldn't start the fan with mSpeed of 100 before I lifted the motor up and fixed it in a position where the pin wouldn't touch any surface, then I could do 100 and even 90.
I'm 81 and have played with arduino a lot and watch all your videos to the end so I don't miss anything. I'm a retired tool and die maker and love electronics as much as you do. I worked with mechanical engineers making changes to a production line so I got to see first hand what was done. Keep up the great series as you do it well. I lole the way you can set all the views to show the circuit, the code or the outputs on screen as you need them. I bet it took you a while to figure that all out.
😊
Thank you very much, Mr. McWhorter, for this amazing tutorial please do not stop teaching.
I was able to do it on my own mostly the same way but I coded 3 if statements not 2 as such:
my middle value for the joystick was 525.
1st If statement "if (yVal >520 && yVal
Paul, thanks for another brilliant lesson. Yes, I am doing all the projects as you advised.
Fantastic!
I am From Myanmar. You are the great teacher Mr Paul.I really enjoy learn your lesson.Thank you for sharing and teaching.I really appreciate you. God bless You Mr Paul.
Hi Paul - another great lesson!
When I did the math, I included 2 extra bits to take into account the 100 speed requirement to get the little guy moving, plus my joystick seems to be a little wonky, neutral can be anywhere from 493-501. So I have 3 x "if" loops (dirVal>20, dirVal
i love your videos by the way im using your tutorials to learn arduino for my project for an upcoming coursework and i cant tell you how much fun you make learn these things. thank you so much paul
Great to hear!
Nailed it!! First shot!! My teacher is awesome tho... I can’t wait to dive into your IMU series, which goes down the road toward WHY I’m learning all this to begin with
Did lesson 39 myself! My line slope did not use zero for output, but the 100 we know is minimum needed to start motor. Also used a dead band for neutral pos.
Thanks Paul, great Project.
BOOM!!! got it done! Thanks, that was a cool task!
Thanks for the tutorial. I was able to make it on my own, although with a few modifications: Instead of plugging the formula with numbers, I put the slope-point formula with variables such as x1, x2, y1, y2, and then, when declaring those variables, I could define (and then modify if I want) the range of the joystick or the motor without changing the formula...
Other modification is that in each formula, I defined the x-value of an endpoint to centerVal + tolerance or centerVal - tolerance, such that there is a dead zone to the left and right of centerVal (the neutral position of the joystick) where the motor is off.
Code:
//y-axis and joystick switch are unused.
const int xPin = A0;
//const int yPin = A1;
//const int switchPin = 6;
const int motorPin = 7;
const int dir1Pin = 8;
const int dir2Pin = 9;
//Constants for both linear functions:
const float centerVal = 505; //In my case, the neutral value of the x-axis is 505
const float tolerance = 3;
const float x1 = centerVal + tolerance;
const float x2 = 1023;
const float y1 = 0;
const float y2 = 255;
const float x3 = centerVal - tolerance;
const float x4 = 0;
const float y3 = 0;
const float y4 = 255;
float xVal;
//float yVal;
bool switchState;
bool dir1 = 0;
bool dir2 = 1;
float motorSpeed;
void setup() {
pinMode(xPin, INPUT);
//pinMode(yPin, INPUT);
//pinMode(switchPin, INPUT_PULLUP);
pinMode(motorPin, OUTPUT);
pinMode(dir1Pin, OUTPUT);
pinMode(dir2Pin, OUTPUT);
Serial.begin(9600);
}
void loop() {
xVal = analogRead(xPin);
if (xVal > x1)
{
dir1 = 1;
dir2 = 0;
motorSpeed = ((y2 - y1) / (x2 - x1)) * (xVal - x1) + y1;
}
else if (xVal < x3)
{
dir1 = 0;
dir2 = 1;
motorSpeed = ((y4 - y3) / (x4 - x3)) * (xVal - x3) + y3;
}
else
{
motorSpeed = 0;
dir1 = 0;
dir2 = 0;
}
analogWrite(motorPin, motorSpeed);
digitalWrite(dir1Pin, dir1);
digitalWrite(dir2Pin, dir2);
Serial.print(xVal);
Serial.print(" ");
Serial.println(motorSpeed);
}
I was able to do this one on my own but my coding was a bit more jumbled and overly complex. Instead of going from 0-255 on the sweep in either direction, I had mine go 100-255 since the fan won't run reliably below 100. Good stuff! I've been learning a lot from these videos and having a very good time doing so. I've always been fascinated by numbers and very much appreciate that you break it down and show the math involved.
Yes, I did the same, starting from 75. This fellow is fabulous isn't he .... uk
Thanks a ton for your videos. I learnt arduino because of you. You work is so neat & clean. I need to learn lot of things from you.
i tried to do this lesson on my own as homework, however i made a small math error and my motor ended up fast in the middle position and off at either extreme of the joystick, i ended up watching through this video with you to walk through my math to find my errors, thanks for a great learning experience!
Boom. I am proud and lucky to have a teacher like you. You are just a majic. Thank you.
Great videos! And yes I do watch these videos all the way through (Nice pics of South Africa; I spent a lot of time there on business.). Looking forward to seeing more of your videos.
Very good project and by myself it was difficutl but I am following your advice on trying it alone and then I come here to check what I was missing o what was wrong, thanks for all this videos.
Hi, thank you for these lessons, I really enjoy them. I have done the assignment on my own, but slighltly differently from you. I created a neutral zone at the middle position of the joystick (from 500 to 510, as mine settled at ~505) to make sure there is no current sent to the motor. Also I have done the math with the lowest motor speed value to be 100, so I gain finer speed control over the travel of the joystick. So my code ended up having 3 if statements. I have to admit that your code with the equal slopes is much more elegant, but mine works too. Thanks again for these lessons.
I was able to do it on my own. All thanks to you.
hi Paul
I was very interested on how you were going to approach this problem, I did not solve the problem, but thanks to you Im getting better.
Your lessons are well planned and well delivered, including holding my breath.
Thankyou again for a very nice lesson.
Cool, thanks
Great Lesson. I was able to do this one. I made an "off range" so that a small movement from center didn't trigger a start in either direction, Other than that my code matched yours. Thanks!
really nice series sir, thank you
I really enjoy (and appreciate) your videos, Paul. Thank you for putting them together. I love how your lessons have built upon each other, and how you incorporate past lessons (review) into new ideas. I also appreciate that you explain the math and concepts in great depth. Although, I do have to confess - I now "cheat" and use the map function for simplicity :)
map function to the rescue! While I do agree that learning the math is important, the map function allows you to EASILY make changes should you need to scale it slightly differently if needed based on hardware.
Great video Paul, I struggle with the maths, but practice will improve me. Really enjoyed doing this project.Thanks again!!
Excellent tutorial, many thanks.
Great videos, thanks Paul. Learning quite a lot from you.
Glad to hear it
BOOOM!!!! I did it on my own then played the lesson, I used the 'map' feature instead of doing the math( I was rushing)...but Ill use the math in future, its no problem for me ...thanks so much, your lessons and teaching methods are amazing
Thanks for a nice video, it's getting clearer and clearer, it's BOOM
Rather than do a fixed neutral position value, I set the motor speed to zero between 500 and 525. Made a few errors with leaving out the decimal points, but managed to get those sorted.
Excellent lesson - it's very helpful to start combining elements from previous projects to make more complicated devices. Thanks!
Love the math. An actual example for equations. Great job!
Still need to practice with the calculations, but its great to see how i progress in these tutorials. Paul your are great and thanks for making these videos.
Incredible lesson sir....I am from India and become your student in your zone.....eagerly waiting for your next lesson... Tuesday at 9:30 pm in India...
Great calculation👍 your educating A-Z to write programs. this is best video about arudino tutorial in TH-cam thank you so much.
Another great lesson! Was able to do it on my own.
Most Excellent
Fun video, Paul! Got it by myself, without looking at how you did it.! Turns out I did it exactly the way you did it.
Fantastic!
I admit I got a little stuck with the maths on this one but it was crystal clear after you'd explained it. Thankyou.
Thank you Paul, I am having some trouble with the math portion having been away from that for ~55 years or so. I very much enjoy the learning process though and appreciate your clear explanations
You can do it!
OK I was moving in the right direction with the two if statements and the < and => 512 with the differing HIGH-LOW to get the different directions, but I struggled with the math. After some online study and then watching you solve it, I realized I was making it way too hard. Watching you solve this I think it finally clicked for me! Haha unfortunately one of the wires broke off the motor, so I had to order a soldering iron so I can fix it before I move on to the next lesson. See you in a few days when I get my motor repaired, and thanks for another fine lesson!
I did it the same way as you did and I was soo happyy!!! Thankyou so much for these lessons!!!!! :D
Wonderful!
I was able to work through the basics of this even up to figuring out I needed two different equations, so I felt pretty good about that, but it fell apart pretty quickly in the coding. I was trying to way over complicate it in ways I can't even explain any more. In the end I had to follow along to sort out where I went wrong. The actual solution was so much simpler than I had it figured. I've got to say, having a guide for this stuff makes it same so simple, but whoever was the first person to ever figure some of this stuff out must've been an absolute diabolical genius! I don't hold out much hope that I will get this next homework assignment on my own but here we go...
Great Lesson. Thanks.
Did the homework, God bless you sir!
Good Tutorial. Your joystick made made life a lot easier but provided a less general solution. My neutral point was 503 meaning that one direction had 503 steps and the other 519. I also used a variable for the minimum speed so that the fan started as soon as the joystick was moved.
The basic speed calculation was (joystick_value - neutral_point)* ( (max_speed - min_speed)/(steps_for_this_direction)) + min_speed.
I did it! I just finished doing it, it works great! I'd be dancing around if I could! Okay, now, going to watch the video...Thanks again!
Great job!
Couldn't get it working on my own... added a decimal to the last constant of B (from y=mx+b) in both equations and it worked. Man, those trailing decimals sure are important in this language!
Had it all done correctly but could not get my motor to run. Had to watch you, I am just having problems with the math and knowing what equation to use. Thank you Paul for taking the time to teach us.
Thanks Paul for your lessons !