Reinforcement learning control of an inverted pendulum using Python, Simulink, and LW-RCP.

ฝัง
- เผยแพร่เมื่อ 24 พ.ค. 2023
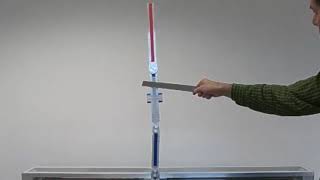
- This video shows the demonstration of reinforcement learning control of a lab-built inverted pendulum. We use Python, Matlab/Simulink, and LW-RCP(Light-weight Rapid Prototyping System) to construct the learning environment for a real inverted pendulum. Real-time data monitoring is easily supported since we use Simulink and LW-RCP, which gives better insight to a control system designer.
* The LW-RCP can be purchased from Sungjin Techwin. For purchase inquiries, please contact sales@switch-vr.com.
이 영상은 연구실에서 제작한 도립진자에 대한 강화학습 기반의 제어에 대한 시연을 보여준다. 실제의 도립진자에 대한 학습환경을 구축하기 위하여 Python, Matlab/Simulink, 그리고 LW-RCP(Light-weight Rapid Prototyping System)을 사용한다. Simulink와 LW-RCP를 사용하기때문에 실시간 data monitoring을 손쉽게 제공받는다. 또한 이를 통해 제어기 설계자는 더 좋은 직관력을 갖게 된다.
* LW-RCP는 성진테크윈으로부터 구입할 수 있습니다. 구매문의는 sales@switch-vr.com로 해주세요.



![[TH] VCT Pacific - Playoffs Grand Final // PRX vs GEN](http://i.ytimg.com/vi/G345ud5yRGA/mqdefault.jpg)




And the best TH-camr posts again
thank you for the info this looks amazing
I would like to ask what hyperparameters did you use for the sac_network? And is this referring to the Soft Actor-Critic method?
I just noticed you're also the creator of the 56 transition controls for a triple inverted pendulum video. Incredible work.
I assume, given that this is linear axis single pendulum, that your circular douple pendulum and linear triple pendulums are made with 'conventional' control theory. What is your view on the future of these kinds of systems and are you going to build more with (deep) reinforcement models? I wonder if these RL models will soon also be able to control triple pendulums.
Wish I could also build physical RL systems like this but have no idea where to start to be honest.
We will do research on reinforcement learning control for rotary double inverted pendulum and linear triple inverted pendulum. However, it will take time because we are just started learning the reinforcement learning. We believe that we can control those pendulums using reinforcement learning in the future.
@@urimiroo Super cool! I subscribed so I'll know when you will upload in the future. Thank you for your reply.
なんか凄くカワイイ❤️ペットにしたい!
Did you guys write any paper for this or any related pendulum control in your previous videos? It would be awesome if you give the name or the link to your papers
We wrote some papers. However, those paper are all in Korean language.
@@urimiroo its a shame then, well I really like your works, all of your videos look simple but the problems to solve behind are all very hard, they also captivate the essences and beauties of control theory so that even a non-specialist can find your video extremely interesting. I hope to read your papers one day, keep up the good work guys
Please, where can I find out more about LW-RCP (Light-weight Rapid Prototyping System)?
You can find more info on LW-RCP from the paper the title of which is "A light-weight rapid control prototyping system based on open source hardware". This paper has been published in IEEE Access. You can download the paper for free.
May I have more information about the hardware setup you are using? Thanks.
1. Pololu DC motor : 24V, reduction ration = 6.3:1, I attached 4000 CPR magnetic encoder to the DC motor by appropriate customization.
2. Pendulum angle measurement : 8196 CPR capacitive encoder
3. Rail system and cart: 2020 aluminum extrusion. You can buy it in Aliexpress. Those are often used for 3D printers.
8196 -> 8192 CPR
so, give me your source code.
Yoooooo