4.2 DH Parameters

ฝัง
- เผยแพร่เมื่อ 16 พ.ค. 2024
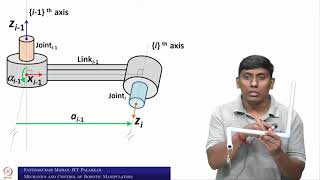
- In this lecture, I introduce the concept of DH parameters for specifying the kinematic structure of a serial link manipulator. I give some worked examples, and also some common joint-to-joint transforms that you might encounter when trying to model robot arms.
My cat Kismet also makes a cameo.






![ตรงที่เดิม - ฝน พรสุดา [ต้นฉบับ :เบส ขวางหวัน]](http://i.ytimg.com/vi/c5YnbGEztI8/mqdefault.jpg)

Probably the best dh parameters video on YT
Very explanatory narration and clear examples.
Thank you for this lecture. The gift that keeps on giving :D
What a cute cat! He is also study with us!
Perefect illustration, break down for each transformation step for each join helped a lot , thanks for making this video
Thank you so much! how do I parameterise spherical joints? One of the joint in the robot we have is a spherical joint, thank you!
Thank you for the explanation. Now i understand about this.
excellent work! help understanding DH well
thank you so much, nice lecture
Thank you so much
What software was used to draw these frames? Any recommendations?
Thank you 😊
thankyou
nice cat
can i have the lecture slide please ?
where can we get the slides of that presentation
drive.google.com/file/d/17cTbTSbQA6b8FD3WVtA_QnEnn2UtfXi8/view
stop the cat