TH-cam
US
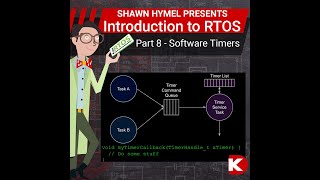
Introduction to RTOS Part 8 - Software Timer | Digi-Key Electronics
12:59
Introduction to RTOS Part 6 - Mutex | Digi-Key Electronics
13:44
What is a semaphore? How do they work? (Example in C)
13:27
#อึ้ง!เหลือจะเชื่อ!ไทยพลิกนรกดับสิงคโปร์คาบ้าน ทะลุเข้ารอบรองชนะเลิศ! คารวะอิชิอิโคตรการเปลี่ยนแปลง!
12:08
แมนยู Corner : คุยหลังเกม แมนฯซิตี้ 1-2 แมนฯยู ชัยชนะมาจากอโมริมกล้าตัด แรชฟอร์ด , การ์นาโช
33:22
🔴 LIVE : ถ่ายทอดสด การออกรางวัลสลากกินแบ่งรัฐบาล งวดวันที่ 16 ธันวาคม 2567
2:01:36
Introduction to RTOS Part 7 - Semaphore | Digi-Key Electronics
DigiKey
ติดตาม
168K
ดาวน์โหลด
โหลดลิงค์.....
มุมมอง 95 078
0
0
เพิ่มลงใน
เพลย์ลิสต์ของฉัน
ดูภายหลัง
แชร์
แชร์
ฝัง
ขนาดวิดีโอ:
1280 X 720
853 X 480
640 X 360
แสดงแผงควบคุมโปรแกรมเล่น
เล่นอัตโนมัติ
เล่นใหม่
เผยแพร่เมื่อ 19 ม.ค. 2025
ความคิดเห็น • 68
ต่อไป
เล่นอัตโนมัติ
12:59
Introduction to RTOS Part 8 - Software Timer | Digi-Key Electronics
DigiKey
มุมมอง 74K
13:44
Introduction to RTOS Part 6 - Mutex | Digi-Key Electronics
DigiKey
มุมมอง 103K
13:27
What is a semaphore? How do they work? (Example in C)
Jacob Sorber
มุมมอง 318K
12:08
#อึ้ง!เหลือจะเชื่อ!ไทยพลิกนรกดับสิงคโปร์คาบ้าน ทะลุเข้ารอบรองชนะเลิศ! คารวะอิชิอิโคตรการเปลี่ยนแปลง!
# จัน ฑาล
มุมมอง 194K
33:22
แมนยู Corner : คุยหลังเกม แมนฯซิตี้ 1-2 แมนฯยู ชัยชนะมาจากอโมริมกล้าตัด แรชฟอร์ด , การ์นาโช
Fluke Family
มุมมอง 274K
2:01:36
🔴 LIVE : ถ่ายทอดสด การออกรางวัลสลากกินแบ่งรัฐบาล งวดวันที่ 16 ธันวาคม 2567
THAIRATH TV Originals
มุมมอง 851K
00:31
How to treat Acne💉
ISSEI / いっせい
มุมมอง 101M
18:43
Experimenting with Buses and Three-State Logic
Sebastian Lague
มุมมอง 629K
17:49
Coding a Web Server in 25 Lines - Computerphile
Computerphile
มุมมอง 359K
10:14
Semaphore Vs. Mutex - A Clear Understanding
Shriram Vasudevan
มุมมอง 102K
12:18
Introduction to RTOS Part 10 - Deadlock and Starvation | Digi-Key Electronics
DigiKey
มุมมอง 84K
11:34
Introduction to RTOS Part 1 - What is a Real-Time Operating System (RTOS)? | Digi-Key Electronics
DigiKey
มุมมอง 920K
10:40
Introduction to RTOS Part 4 - Memory Management | Digi-Key Electronics
DigiKey
มุมมอง 160K
15:03
Learn Machine Learning Like a GENIUS and Not Waste Time
Infinite Codes
มุมมอง 387K
20:03
FreeRTOS Tutorial 3.0 || Binary Semaphore || STM32 || CMSIS || CUBEIDE
ControllersTech
มุมมอง 38K
14:51
Highlight | อัจฉริยะสาวไส้...เบื้องลึกเหตุยิง "สจ.โต้งปราจีนบุรี" | เปิดโต๊ะข่าว | 17 ธ.ค.67
PPTV HD 36
มุมมอง 390K
1:23:46
【หนังพากย์ไทย】ยอดฝีมือสังหารนักโทษ แต่นักโทษเป็นปรมาจารย์กังฟูที่ซ่อนอยู่ เขาจัดการทั้งหมดในทันที
Fresh Thailand
มุมมอง 468K
10:41
HIGHLIGHTS : Singapore 2-4 Thailand | ASEAN Championship 2024 | 17.12.24
BG SPORTS
มุมมอง 953K
03:23
PiXXiE - Pick A Card | OFFICIAL M/V
LIT Entertainment
มุมมอง 153K
00:11
Cat mode activated 🤣
Kotiki_Z
มุมมอง 2.1M
00:17
Mache leckere Lutscher mit diesem PRO-Gadget! 🚽🍭
Chill Thesoul Out German
มุมมอง 8M
9:37:15
🔴𝐋𝐈𝐕𝐄 การแข่งขัน RoV นานาชาติ AIC 2024 รอบ Swiss Stage วันที่ 9
Garena RoV Thailand
มุมมอง 891K
01:34
The White Lotus Season 3 | Official Teaser | Max
Max
มุมมอง 1.3M