Chapter 1: Introduction to Reinforcement Learning in the Real World [0:00-0:54] - Sergey Lan discusses the importance of reinforcement learning (RL) in AI, differentiating it from generative AI techniques. - Highlights the ability of RL to achieve results beyond human capabilities, using the example of AlphaGo's unique moves. Chapter 2: Advantages of Real World RL and Challenges in Simulation [0:54-2:13] - Emphasizes the power of RL in real-world scenarios over simulation. - Discusses the challenges in building accurate simulators, especially for complex environments involving human interaction. Chapter 3: Reinforcement Learning in Complex Environments [2:13-3:18] - Describes how RL is more effective in complex, variable environments. - Explains the need for advanced learning algorithms to interact with these environments for emerging behaviors. - Argues for RL's potential in optimizing policies specifically for real-world settings. Chapter 4: Progress and Practicality of Real-World Deep RL [3:18-5:52] - Outlines the advancements in deep RL, making it more practical and scalable in the real world. - Details on how sample complexity has significantly improved, allowing for real-world locomotion skills to be learned in minutes. - Discusses leveraging prior data in RL and overcoming challenges previously considered as showstoppers. Chapter 5: Learning Locomotion Skills in Real World with Deep RL [5:52-11:46] - Sergey shares examples of learning locomotion skills in real robots, progressing from simplified models to more complex ones. - Highlights the significant reduction in training time due to improved algorithms and engineering techniques. - Discusses the importance of regularization and taking numerous gradient steps for fast learning. Chapter 6: Manipulation Skills Through Real World Experience [11:46-16:03] - Transition to learning manipulation skills in real-world settings. - Discusses the challenges and solutions for continuous learning without human intervention. - Explains the integration of multiple tasks to enable autonomous learning and resetting. Chapter 7: Leveraging Heterogeneous Prior Data in RL [16:03-21:40] - Focuses on combining data-driven learning with RL to improve efficiency. - Describes how pre-training with diverse data can lead to rapid adaptation in new tasks. - Uses examples to illustrate the efficiency of RL with prior data in both locomotion and manipulation tasks. Chapter 8: Scaling Deep RL for Practical Applications [21:40-26:30] - Sergey discusses the scalability of deep RL in practical, real-world applications. - Provides examples of real-world deployments, including navigation and waste sorting robots. - Emphasizes the importance of continuous improvement and adaptation in diverse environments. Chapter 9: Future Directions and Potential of Real World RL [26:30-38:20] - Concludes with a discussion on future potentials and improvements needed in real world RL. - Suggests areas for further research, including leveraging prior data for exploration and lifelong learning. - Acknowledges the need for more stable, efficient, and reliable RL methods for mainstream adoption.
Extremely interesting, the part about being less aggressive when prediction is harder kind of reninds me of some speculative thoughts I had about artificial neurotransmitters aping the locus coruleus norepinephrine system to control error rates of subcircuits to speed up learning, that idea is still underdeveloped though and I was thinking more about optimizing the joint relationships of different routes into a neuron which would have atrocious scaling done naively.
Thanks - I haven't been tracking RL for past several years, so this is a nice high-level update on things, with linked papers for details. Given this progress, are we about to see an explosion in robotics deployment? If so, will it be mostly industrial, or some consumer impact also?
I'd bet that the consumer impact will be there before this will be picked up by "industrial" applications. Industrial applications are so stuck in the 70s style static robot programming with SPS and ladder logic that they will be extremely late to the game compared to startups and research already working with AI/ML. Also, this will have the most impact on small to medium size companies. Big companies can already afford an expensive robot programmer to the do the programming of the industrial robot, small companies simply can't, so they will benefit most from easier (and therefore much cheaper) robot programming. The hardware might still be expensive, but the current reality is that programming a robot is much more expensive than the hardware (even something like a UR isn't fully end user friendly and requires expert knowledge of some level).









Chapter 1: Introduction to Reinforcement Learning in the Real World [0:00-0:54]
- Sergey Lan discusses the importance of reinforcement learning (RL) in AI, differentiating it from generative AI techniques.
- Highlights the ability of RL to achieve results beyond human capabilities, using the example of AlphaGo's unique moves.
Chapter 2: Advantages of Real World RL and Challenges in Simulation [0:54-2:13]
- Emphasizes the power of RL in real-world scenarios over simulation.
- Discusses the challenges in building accurate simulators, especially for complex environments involving human interaction.
Chapter 3: Reinforcement Learning in Complex Environments [2:13-3:18]
- Describes how RL is more effective in complex, variable environments.
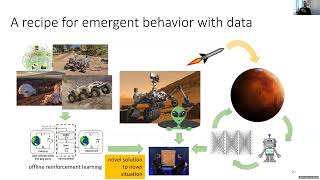
- Explains the need for advanced learning algorithms to interact with these environments for emerging behaviors.
- Argues for RL's potential in optimizing policies specifically for real-world settings.
Chapter 4: Progress and Practicality of Real-World Deep RL [3:18-5:52]
- Outlines the advancements in deep RL, making it more practical and scalable in the real world.
- Details on how sample complexity has significantly improved, allowing for real-world locomotion skills to be learned in minutes.
- Discusses leveraging prior data in RL and overcoming challenges previously considered as showstoppers.
Chapter 5: Learning Locomotion Skills in Real World with Deep RL [5:52-11:46]
- Sergey shares examples of learning locomotion skills in real robots, progressing from simplified models to more complex ones.
- Highlights the significant reduction in training time due to improved algorithms and engineering techniques.
- Discusses the importance of regularization and taking numerous gradient steps for fast learning.
Chapter 6: Manipulation Skills Through Real World Experience [11:46-16:03]
- Transition to learning manipulation skills in real-world settings.
- Discusses the challenges and solutions for continuous learning without human intervention.
- Explains the integration of multiple tasks to enable autonomous learning and resetting.
Chapter 7: Leveraging Heterogeneous Prior Data in RL [16:03-21:40]
- Focuses on combining data-driven learning with RL to improve efficiency.
- Describes how pre-training with diverse data can lead to rapid adaptation in new tasks.
- Uses examples to illustrate the efficiency of RL with prior data in both locomotion and manipulation tasks.
Chapter 8: Scaling Deep RL for Practical Applications [21:40-26:30]
- Sergey discusses the scalability of deep RL in practical, real-world applications.
- Provides examples of real-world deployments, including navigation and waste sorting robots.
- Emphasizes the importance of continuous improvement and adaptation in diverse environments.
Chapter 9: Future Directions and Potential of Real World RL [26:30-38:20]
- Concludes with a discussion on future potentials and improvements needed in real world RL.
- Suggests areas for further research, including leveraging prior data for exploration and lifelong learning.
- Acknowledges the need for more stable, efficient, and reliable RL methods for mainstream adoption.
This was truly an amazing presentation.
thank you for sharing
Absolutely brilliant talk!
We need to make people focus back to RL again
A very nice overview. What is a good place to learn it from code examples?
Extremely interesting, the part about being less aggressive when prediction is harder kind of reninds me of some speculative thoughts I had about artificial neurotransmitters aping the locus coruleus norepinephrine system to control error rates of subcircuits to speed up learning, that idea is still underdeveloped though and I was thinking more about optimizing the joint relationships of different routes into a neuron which would have atrocious scaling done naively.
Thanks - I haven't been tracking RL for past several years, so this is a nice high-level update on things, with linked papers for details. Given this progress, are we about to see an explosion in robotics deployment? If so, will it be mostly industrial, or some consumer impact also?
I'd bet that the consumer impact will be there before this will be picked up by "industrial" applications. Industrial applications are so stuck in the 70s style static robot programming with SPS and ladder logic that they will be extremely late to the game compared to startups and research already working with AI/ML. Also, this will have the most impact on small to medium size companies. Big companies can already afford an expensive robot programmer to the do the programming of the industrial robot, small companies simply can't, so they will benefit most from easier (and therefore much cheaper) robot programming. The hardware might still be expensive, but the current reality is that programming a robot is much more expensive than the hardware (even something like a UR isn't fully end user friendly and requires expert knowledge of some level).
thank you mate