
- 75
- 43 059
LARR SNU
เข้าร่วมเมื่อ 24 ก.พ. 2019
Lab for autonomous robotics research of Seoul national university, South Korea
BPMP-Tracker: A Versatile Aerial Target Tracker Using Bernstein Polynomial Motion Primitives
■Status: Accepted for publication in IEEE Robotics and Automation Letters (RA-L)
■Category: Aerial Cinematography, Visual Servoing, Motion and Path Planning
■Author: Yunwoo Lee, Jungwon Park, Boseong Jeon, Seungwoo Jung, and H. Jin Kim
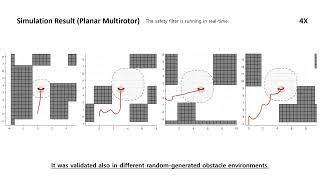
■Abstract: This letter presents a versatile trajectory planning pipeline for aerial tracking. The proposed tracker is capable of handling various chasing settings such as complex unstructured environments, crowded dynamic obstacles and multiple-target following. Among the entire pipeline, we focus on developing a predictor for future target motion and a chasing trajectory planner. For rapid computation, we employ the sample-check-select strategy: modules sample a set of candidate movements, check multiple constraints, and then select the best trajectory. Also, we leverage the properties of Bernstein polynomials for quick calculations. The prediction module predicts the trajectories of the targets, which do not overlap with static and dynamic obstacles. Then the trajectory planner outputs a trajectory, ensuring various conditions such as occlusion and collision avoidance, the visibility of all targets within a camera image and dynamical limits. We fully test the proposed tracker in simulations and hardware experiments under challenging scenarios, including dual-target following, environments with dozens of dynamic obstacles and complex indoor and outdoor spaces.
■Contact: yunwoo333@gmail.com
#robotics #drone #aerialcinematography
■Category: Aerial Cinematography, Visual Servoing, Motion and Path Planning
■Author: Yunwoo Lee, Jungwon Park, Boseong Jeon, Seungwoo Jung, and H. Jin Kim
■Abstract: This letter presents a versatile trajectory planning pipeline for aerial tracking. The proposed tracker is capable of handling various chasing settings such as complex unstructured environments, crowded dynamic obstacles and multiple-target following. Among the entire pipeline, we focus on developing a predictor for future target motion and a chasing trajectory planner. For rapid computation, we employ the sample-check-select strategy: modules sample a set of candidate movements, check multiple constraints, and then select the best trajectory. Also, we leverage the properties of Bernstein polynomials for quick calculations. The prediction module predicts the trajectories of the targets, which do not overlap with static and dynamic obstacles. Then the trajectory planner outputs a trajectory, ensuring various conditions such as occlusion and collision avoidance, the visibility of all targets within a camera image and dynamical limits. We fully test the proposed tracker in simulations and hardware experiments under challenging scenarios, including dual-target following, environments with dozens of dynamic obstacles and complex indoor and outdoor spaces.
■Contact: yunwoo333@gmail.com
#robotics #drone #aerialcinematography
มุมมอง: 437
วีดีโอ


Category-level Neural Field for Reconstruction of Partially Observed Objects in Indoor Environment
มุมมอง 4645 หลายเดือนก่อน
* Status: Accepted for publication in IEEE Robotics and Automation Letters (RA-L) * Category: Category-level Neural Field for Reconstruction of Partially Observed Objects in Indoor Environment * Author: Taekbeom Lee, Youngseok Jang, H. Jin Kim * Abstract: Neural implicit representation has attracted attention in 3D reconstruction through various success cases. For further applications such as s...

Autonomous Heavy Object Pushing Using a Coaxial Tiltrotor
มุมมอง 4925 หลายเดือนก่อน
* Status: Accepted for publication in IEEE Transactions on Automation Science and Engineering (T-ASE) * Authors: Sunwoo Hwang¹, Dongjae Lee¹, Changhyeon Kim, and H. Jin Kim (The first two authors contributed equally to this work) * Abstract: Aerial physical interaction (APhI) with a multirotor-based platform such as pushing a heavy object demands generation of a sufficiently large interaction f...

Mono-Camera-Only Target Chasing for a Drone in a Dense Environment by Cross-Modal Learning
มุมมอง 6815 หลายเดือนก่อน
* Status: Accepted for publication in IEEE Robotics and Automation Letters (RA-L) * Category: Vision-Based Navigation, Visual Learning, Deep Learning for Visual Perception * Author: Seungyeon Yoo¹, Seungwoo Jung¹, Yunwoo Lee, Dongseok Shim, and H. Jin Kim * Abstract: Chasing a dynamic target in a dense environment is one of the challenging applications of autonomous drones. The task requires mu...

Haptic-Based Bilateral Teleoperation of Aerial Manipulator for Extracting Wedged Object
มุมมอง 1896 หลายเดือนก่อน
* Full title: Haptic-Based Bilateral Teleoperation of Aerial Manipulator for Extracting Wedged Object with Compensation of Human Reaction Time * Status: Accepted for IEEE International Conference on Unmanned Aircraft Systems (ICUAS) 2024 * Category : Aerial manipulation, Teleoperation * Author : Jeonghyun Byun, Dohyun Eom, and H. Jin Kim * Abstract: Bilateral teleoperation of an aerial manipula...

Autonomous Excavator for Precise Earthcutting and Onboard Landscape Inspection
มุมมอง 5116 หลายเดือนก่อน
* Status: Accepted for publication in IEEE Robotics and Automation Magazine (RAM) * Author: Inkyu Jang*, Junha Kim*, Dongjae Lee*, Changhyeon Kim*, Changsuk Oh, Youngbum Kim, Sangwook Woo, Heejee Sung, and H. Jin Kim * Abstract: Autonomous excavator systems can alleviate the issues caused by the shortage of skilled labor forces and increasing labor costs. For autonomous excavation, real-time la...

Image-Based Time-Varying Contact Force Control of Aerial Manipulator using Robust Impedance Filter
มุมมอง 3097 หลายเดือนก่อน
* Status: Accepted for IEEE Robotics and Automation Letters (RA-L) 2024 * Category : Aerial manipulation * Author : Jeonghyun Byun, Junha Kim, Dohyun Eom, Dongjae Lee, Changhyeon Kim and H. Jin Kim * Abstract: The use of aerial manipulators for safe and efficient physical interaction with their surrounding environments has been gaining attention within the aerial robotics research community. In...
Safe Control for Navigation in Cluttered Space using Multiple Lyapunov-Based CBFs
มุมมอง 3378 หลายเดือนก่อน
* Status: Accepted for publication in IEEE Robotics and Automation Letters (RA-L) * Category: Robot Control * Author: Inkyu Jang, and H. Jin Kim * Abstract: Control barrier functions (CBFs) are powerful tools for ensuring safety in controlled systems, commonly employed through the construction of a safety filter using quadratic programming (QP), known as CBF-QP. However, synthesizing a CBF spec...

Safe Receding Horizon Motion Planning with Infinitesimal Update Interval
มุมมอง 1938 หลายเดือนก่อน
* Status: Accepted for presentation at 2024 IEEE International Conference on Robotics and Automation (ICRA) * Category: Motion Planning and Control * Author: Inkyu Jang, Sunwoo Hwang, Jeonghyun Byun, and H. Jin Kim * Abstract: Safety verification in motion planning is known to be computationally burdensome, despite its importance in robotics. In this paper, we investigate the behavior of safe r...
Autonomous Aerial Perching and Unperching Using Omnidirectional Tiltrotor and Switching Controller
มุมมอง 5418 หลายเดือนก่อน
* Status: Accepted for publication in 2024 IEEE International Conference on Robotics and Automation (ICRA) * Category: New Aerial Platforms * Authors: Dongjae Lee, Sunwoo Hwang, Jeonghyun Byun, Seung Jae Lee, H. Jin Kim * Abstract: Aerial unperching of multirotors has received little attention as opposed to perching that has been investigated to elongate operation time. This study presents a ne...
SNeRL: Semantic-aware Neural Radiance Fields for Reinforcement Learning
มุมมอง 1.1Kปีที่แล้ว
* Status: accepted for publication in the Conference on Machine Learning (ICML) 2023 * Category: Autonomous Robot Learning * Author : Dongseok Shim*, Seungjae Lee*, and H. Jin. Kim (* Equal contribution) * Abstract: As previous representations for reinforcement learning cannot effectively incorporate a human-intuitive understanding of the 3D environment, they usually suffer from sub-optimal per...
Demonstration-free Autonomous Reinforcement Learning via Implicit and Bidirectional Curriculum
มุมมอง 183ปีที่แล้ว
* Status: accepted for publication in the Conference on Machine Learning (ICML) 2023 * Category: Autonomous Robot Learning * Author : Jigang Kim*, Daesol Cho*, and H. Jin Kim (* Equal contribution) * Abstract: While reinforcement learning (RL) has achieved great success in acquiring complex skills solely from environmental interactions, it assumes that resets to the initial state are readily av...
Decentralized Deadlock-free Trajectory Planning for Quadrotor Swarmin Obstacle-rich Environments
มุมมอง 1.2Kปีที่แล้ว
* Status: accepted for publication in IEEE International Conference on Robotics and Automation (ICRA) 2023 * Category: Multi-robot Systems * Authors: Jungwon Park, Inkyu Jang, and H. Jin Kim * Abstract: This paper presents a decentralized multi-agent trajectory planning (MATP) algorithm that guarantees to generate a safe, deadlock-free trajectory in an obstacle-rich environment under a limited ...
DLSC: Distributed Multi-Agent Traj. Planning in Maze-like Dynamic Envs using Linear safe corridor
มุมมอง 374ปีที่แล้ว
* Status: accepted for publication in IEEE Transactions on Robotics (T-RO) * Category: Multi-robot Systems * Authors: Jungwon Park, Yunwoo Lee, Inkyu Jang, and H. Jin Kim * Abstract: This paper presents an online distributed trajectory planning algorithm for a quadrotor swarm in a maze-like dynamic environment. We utilize a dynamic linear safe corridor (DLSC) to construct the feasible collision...
Minimally actuated tiltrotor for perching and normal force exertion
มุมมอง 1.3Kปีที่แล้ว
* Status: accepted for publication in 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (arxiv.org/abs/2306.14425) * Category: Aerial Manipulation * Authors: Dongjae Lee, Sunwoo Hwang, Changhyeon Kim, Seung Jae Lee, and H. Jin Kim * Abstract: This study presents a new hardware design and control of a minimally actuated 5 control degrees of freedom (CDoF) quadrotor-...
A Hybrid Controller Enhancing Transient Perform. for an Aerial Manipulator Extracting a Wedged Obj.
มุมมอง 447ปีที่แล้ว
A Hybrid Controller Enhancing Transient Perform. for an Aerial Manipulator Extracting a Wedged Obj.
Object-based SLAM utilizing unambiguous pose parameters considering general symmetry types
มุมมอง 1.2Kปีที่แล้ว
Object-based SLAM utilizing unambiguous pose parameters considering general symmetry types
DHRL: A Graph-Based Approach for Long-Horizon and Sparse Hierarchical Reinforcement Learning
มุมมอง 623ปีที่แล้ว
DHRL: A Graph-Based Approach for Long-Horizon and Sparse Hierarchical Reinforcement Learning
Globally Defined Dynamic Modelling and Geometric Tracking Controller Design for Aerial Manipulator
มุมมอง 610ปีที่แล้ว
Globally Defined Dynamic Modelling and Geometric Tracking Controller Design for Aerial Manipulator
Safe and Distributed Multi-Agent Motion Planning under Minimum Speed Constraints
มุมมอง 468ปีที่แล้ว
Safe and Distributed Multi-Agent Motion Planning under Minimum Speed Constraints
S2P: State-conditioned Image Synthesis for Data Augmentation in Offline Reinforcement Learning
มุมมอง 140ปีที่แล้ว
S2P: State-conditioned Image Synthesis for Data Augmentation in Offline Reinforcement Learning
Stable Contact Guaranteeing Motion/Force Control for an Aerial Manipulator on a Tilted Surface
มุมมอง 288ปีที่แล้ว
Stable Contact Guaranteeing Motion/Force Control for an Aerial Manipulator on a Tilted Surface
Real-time Hetero-Stereo Matching for Event and Frame Camera with Aligned Events
มุมมอง 4282 ปีที่แล้ว
Real-time Hetero-Stereo Matching for Event and Frame Camera with Aligned Events
Unsupervised Reinforcement Learning for Transferable Manipulation Skill Discovery
มุมมอง 8242 ปีที่แล้ว
Unsupervised Reinforcement Learning for Transferable Manipulation Skill Discovery
Automating Reinforcement Learning with Example-based Resets
มุมมอง 3452 ปีที่แล้ว
Automating Reinforcement Learning with Example-based Resets
Target-visible Polynomial Trajectory Generation within an MAV Team
มุมมอง 1.1K2 ปีที่แล้ว
Target-visible Polynomial Trajectory Generation within an MAV Team
Autonomous Aerial Dual-Target Following among Obstacles
มุมมอง 4593 ปีที่แล้ว
Autonomous Aerial Dual-Target Following among Obstacles
IROS2021 presentation: Stability and Robustness Analysis of Plug-Pulling using an Aerial Manipulator
มุมมอง 3113 ปีที่แล้ว
IROS2021 presentation: Stability and Robustness Analysis of Plug-Pulling using an Aerial Manipulator
Topology-Guided Path Planning for Reliable Visual Navigation of MAVs
มุมมอง 8323 ปีที่แล้ว
Topology-Guided Path Planning for Reliable Visual Navigation of MAVs
What i should learn to work on such projects ? I love this projects so much
After watching your video, I found it very interesting, may I ask which way do you describe the OTG of the present pose, Euler Angle, quaternion or SO(3), or something else?
Hello. How much is the estimated cost of a set of equipment and a program for this excavator? Can an excavator also see and load fragmented rocks with a size of 0-500/600mm?
The real-world demo is amazing!
Thank you!
Looks good!!! :)
At last!!
안녕하세요! 저는 현재 대학원 진학을 목표로 하고 있는 타대학교 기계공학과 학생입니다. 가장 관심있는 분야가 control system 과 드론쪽이여서 관련 있는 영상을 찾아보다가 이 영상을 접하게 되었습니다. 영상을 시청해보았는데 너무 유용하고 도움이 많이 되어서 혹시 1부 영상이 현재 비공개 상태인것 같은데 2부 뿐만아니라 다른 관련 영상도 시청할 수 있을련지 문의드려봅니다. 무엇보다 정말 유용하고 좋은 영상 유투브에 업로드해주셔서 감사합니다! :)
Another amazing video 😊
May I ask if there is any open source on GitHub
Nice work! What kind of point feature was used for vSLAM frontend?
Thank you for showing interest in our research. In this research, we used a vSLAM system operating on a single robot, specifically adapting orb-slam2 to fit the collaborative SLAM framework. So, we utilized ORB features as the point feature.
Good work, keep it up !
Great research.good luck
This study is interesting. Is it possible to fly stably near the singularity with the proposed controller? In Scenario 2, the tilt control is up to 60 degrees, but can it hover at higher tilt conditions?
Thank you for your interest. Due to rotor saturation, 60 degrees was almost the maximum tilt angle with the current hardware, but I believe larger tilt angle can be achieved using bigger propellers and compatible rotors. As you noticed, the tiltrotor encounters singularity at 90 deg pitching. Such issue and future work related to it is further explained in the paper, and to put it short, singularity at 90 deg pitching can be bypassed by realigning the rotating axes to have some bias in z_b direction.
@@DongjaeLee95 I didn't understand how to avoid singularities, but I guess you mean to produce some distance between front and rear rotors?
@@akinorisakaguchi7390 Yes
He is Korean
amazing work! do you guys have code for this?
Demo code is available at: haram-kim.github.io/Occlusion-Accumulation/
Looks good! :)
Amazing works!
fantastic work
Nice work......
Nice work!